欢迎来到CC规范网,争做您的第一个学习站!
欢迎来到CC规范网,争做您的第一个学习站!
中华人民共和国行业标准
中低速磁浮交通运行控制技术规范
Technical code for automatic train control of medium and low speed maglev transit
CJJ/T 255-2017
批准部门:中华人民共和国住房和城乡建设部
施行日期:2017年10月1日
中华人民共和国住房和城乡建设部公告
第1521号
住房城乡建设部关于发布行业标准《中低速磁浮交通运行控制技术规范》的公告
现批准《中低速磁浮交通运行控制技术规范》为行业标准,编号为CJJ/T 255-2017,自2017年10月1日起实施。
本规范由我部标准定额研究所组织中国建筑工业出版社出版发行。
中华人民共和国住房和城乡建设部
2017年4月11日
前言
根据住房和城乡建设部《关于印发<2010年工程建设标准规范制订、修订计划>的通知》(建标[2010]43号)的要求,规范编制组经广泛调查研究,认真总结实践经验,参考有关国际标准和国外先进标准,并在广泛征求意见的基础上,编制了本规范。
本规范的主要技术内容是:1.总则;2.术语;3.基本规定;4.闭塞方式;5.运行控制系统;6.车辆基地;7.列车检测与信息传递;8.信号显示;9.系统供电;10.系统的电磁兼容与防护;11.检测和验收。
本规范由住房和城乡建设部负责管理,由北京控股磁悬浮技术发展有限公司负责具体技术内容的解释。执行过程中如有意见或建议,请寄送北京控股磁悬浮技术发展有限公司(地址:北京市朝阳区东四环中路82号金长安大厦C座25层邮编:100124)
本规范主编单位:北京控股磁悬浮技术发展有限公司
北京全路通信信号研究设计院集团有限公司
本规范参编单位:国防科学技术大学
中国铁路设计集团有限公司
株洲中车时代电气股份有限公司
中车唐山机车车辆有限公司
中车青岛四方车辆研究所有限公司
同济大学
本规范主要起草人:孙吉良 赵东亮 黄剑 代继龙 江坤 李夏 卓开阔 郑万昀 张杰 刘键 吴松 龙志强 李杰 骆力 管建华 夏冷 刘金瑞 张佩竹 邓红元 李向红 虞翊 潘光熙 袁淑清 王军 陈川 许义景 王永刚 刘少克 陈贵荣 窦峰山 林鸿 王凤鸣 李宏
本规范主要审查人:申大川 王勇智 王微光 马连川 喻小红 董德存 黄足平 张方 孙凤桐
1 总 则
1.0.1 为满足中低速磁浮交通运行组织与运营管理要求,保障中低速磁浮列车运行安全,制定本规范。
1.0.2 本规范适用于列车最高运行速度为120km/h的中低速磁浮交通工程的运行控制系统的设计、施工及验收。
1.0.3 运行控制系统的设计、施工及验收除应符合本规范外,尚应符合国家现行有关标准的规定。
2 术 语
2.0.1 列车运行控制 automatic train control(ATC)
实现列车自动防护、列车自动监控、列车自动运行和计算机联锁控制技术的总称。
2.0.2 列车自动防护 automatic train protection(ATP)
实现列车运行间隔、超速防护和车门等自动安全控制技术的总称。
2.0.3 列车自动监控 automatic train supervision(ATS)
实现列车运行的自动监视、控制、调整和管理等技术的总称。
2.0.4 列车自动运行 automatic train operation(ATO)
实现列车启动、速度调整、定点停车和车门等自动控制技术的总称。
2.0.5 计算机联锁 computer interlocking(CI)
以计算机技术为核心,自动实现区段、道岔、信号机等防护技术的总称。
2.0.6 无人驾驶 driverless train control
实现列车全自动监控、安全防护和运行控制。
2.0.7 车地通信 train to wayside communication(TWC)
实现列车车载设备和地面设备双向通信功能的系统。
2.0.8 移动授权 movement authority(AM)
列车在指定方向上可以走行的距离。
2.0.9 区域控制器 zone controller(ZC)
实现中低速磁浮交通地面区域控制范围内列车自动防护功能的安全计算机设备。
2.0.10 定点停车 fixed-point stopping
自动控制列车在指定位置停车。
2.0.11 目标速度 target speed
列车运行至前方目标地点应达到的允许速度。
2.0.12 目标距离 target distance
列车运行至前方目标地点的走行距离。
2.0.13 闭塞 block
用信号或凭证保证运行列车之间保持安全追踪间隔的技术方法。
2.0.14 移动闭塞 moving block
列车之间的最小安全追踪间隔不预先设定,并随列车的移动、速度的变化而变化的闭塞方式。
2.0.15 准移动闭塞 quasi-moving block
列车之间的最小安全追踪间隔预先设定且固定不变,并根据前方目标状态设定列车的目标距离和目标速度的闭塞方式。
2.0.16 保护区段 overlap section
为实现超速防护,保证安全停车而延伸的闭塞区段。
2.0.17 安全保护距离 safe protection distance
实施停车安全控制时,预定停车位置至限制点的安全距离。
2.0.18 风险 risk
危害发生的频率及造成损失的严重程度的组合。
2.0.19 安全性 safety
免除不可接受风险的状态。
2.0.20 安全完整性 safety integrity
在一定时间内,在规定的条件下,系统或产品能够完成规定的安全功能、未经授权不能改变的特性。
2.0.21 安全完整性等级 safety integrity level(SIL)
安全完整性的一种度量。为表示系统相关安全功能的安全完整性要求而定义的一系列离散等级。
2.0.22 平均故障间隔时间 mean time between failures(MT-BF)
系统发生造成系统功能缺失运行的故障的平均间隔时间。
2.0.23 平均故障修复时间 mean time to repair(MTTR)
系统功能丧失模式(即故障运行模式或失效模式)发生瞬间,修复到系统全功能模式的瞬间所用的平均修复时间。
2.0.24 非限制人工驾驶 not restricted manual(NRM)
司机按照操作规程驾驶列车安全运行。
2.0.25 限制人工驾驶 restricted manual(RM)
在地面运行控制设备故障或不设地面运行控制设备的线路,列车按规定限速运行,超速时实施紧急制动停车控制。
2.0.26 受控人工驾驶 supervised manual(SM)
司机在列车自动防护设备监控下驾驶列车运行。
2.0.27 ATO驾驶模式 ATO mode(AM)
司机监控下的列车自动运行模式。
2.0.28 无人驾驶模式 driverless mode
无司机监控的列车自动运行模式。
2.0.29 故障-安全原则 fail-safe principle
系统、设备或电路出现故障或错误时,系统仍维持在安全状态运行或过渡到另一种安全状态所遵循的准则。
3 基本规定
3.1 一般规定
3.1.1 运行控制系统必须配备列车自动防护(ATP)系统和计算机联锁(CI)系统。
3.1.2 运行控制系统车载设备严禁超出车辆限界,运行控制系统的地面设备严禁侵入设备限界。
3.1.3 运行控制系统设备应符合城市轨道交通使用环境的要求,设于高架线路或地面线路的运行控制设备应与城市景观相协调。
3.1.4 运行控制系统宜按照使用年限20年进行设计。
3.1.5 运行控制系统设备,应采用技术先进、经济合理、满足功能及安全可靠要求的产品。
3.1.6 运行控制系统应确保最不利条件下的列车运行安全。
3.1.7 运行控制系统应满足环境保护要求,应符合电磁兼容性要求。
3.1.8 运行控制系统应具有高可靠性和高可用性,涉及行车安全的运行控制设备应符合故障-安全原则。
3.1.9 运行控制系统设备应便于使用、管理及维护。
3 基本规定
3.1 一般规定
3.1.1 运行控制系统必须配备列车自动防护(ATP)系统和计算机联锁(CI)系统。
3.1.2 运行控制系统车载设备严禁超出车辆限界,运行控制系统的地面设备严禁侵入设备限界。
3.1.3 运行控制系统设备应符合城市轨道交通使用环境的要求,设于高架线路或地面线路的运行控制设备应与城市景观相协调。
3.1.4 运行控制系统宜按照使用年限20年进行设计。
3.1.5 运行控制系统设备,应采用技术先进、经济合理、满足功能及安全可靠要求的产品。
3.1.6 运行控制系统应确保最不利条件下的列车运行安全。
3.1.7 运行控制系统应满足环境保护要求,应符合电磁兼容性要求。
3.1.8 运行控制系统应具有高可靠性和高可用性,涉及行车安全的运行控制设备应符合故障-安全原则。
3.1.9 运行控制系统设备应便于使用、管理及维护。
3.2 运行控制系统的构成
3.2.1 运行控制系统按照功能划分宜由列车自动监控(ATS)、列车自动防护(ATP)、列车自动运行(ATO)和计算机联锁(CI)四个系统构成,宜配置维护监测系统。
3.2.2 运行控制系统的传输网络(不含车地通信网路)应采用封闭的专用网络。
3.2.3 运行控制系统按系统位置应分为控制中心系统、地面设备系统、车载设备系统及车辆基地系统。各系统构成应符合下列规定:
1 控制中心系统应由列车自动监控(ATS)系统控制中心设备、电源设备和维护监测设备构成。
2 地面设备系统应由列车自动监控(ATS)系统的车站设备、计算机联锁设备、区域控制器设备、车地通信(TWC)设备、列车占用检测设备、电源设备和维护监测设备构成。
3 车载设备系统应由车载列车自动防护(ATP)设备、列车自动运行(ATO)设备和车地通信(TWC)设备构成。
4 车辆基地系统应由列车自动监控(ATS)系统的车辆基地设备、计算机联锁设备、列车占用检测设备、车地通信(TWC)设备、电源设备、试车线设备、培训设备和维护监测设备构成。
3.2.4 列车自动监控(ATS)系统构成应符合下列规定:
1 列车自动监控(ATS)系统宜由控制中心设备、车站设备和车辆基地设备组成。
2 控制中心列车自动监控(ATS)设备应包括服务器、工作站、网络设备、接口设备和打印机。工作站应包括调度员工作站、调度长工作站、时刻表编辑工作站、运行图显示工作站、维护工作站和培训工作站。
3 车站列车自动监控(ATS)设备应包括服务器或工作站、网络设备和发车指示器。
4 车辆基地列车自动监控(ATS)设备应包括服务器或工作站和网络设备。
5 列车自动监控(ATS)系统数据传输通道应采用冗余的网络结构方式。
6 列车自动监控(ATS)系统主要设备应采用冗余结构,主用、备用设备应实现无缝切换。
3.2.5 列车自动防护(ATP)系统的构成应符合下列规定:
1 列车自动防护(ATP)系统应由车载列车自动防护(ATP)设备、区域控制器(ZC)设备、车地通信(TWC)地面和车载设备组成。
2 车载列车自动防护(ATP)设备应包括列车自动防护(ATP)车载计算机设备、测速设备、人机显示设备和接口设备。
3 区域控制器的站间通信通道,应采用独立的冗余通道。
4 区域控制器和列车自动防护(ATP)车载计算机设备宜采用二乘二取二或三取二冗余结构。
3.2.6 无人驾驶系统列车自动运行(ATO)设备应采用冗余结构,并应保证主用、备用设备之间的无缝切换。
3.2.7 计算机联锁系统的构成应符合下列规定:
1 计算机联锁系统应包括联锁计算机、车站控制显示工作站、驱动及采集设备和维护工作站。
2 联锁计算机宜采用二乘二取二或三取二冗余结构。
3 计算机联锁系统的站间通信通道,应采用独立的冗余通道。
3.2.8 维护监测系统宜由下列设备或设施构成:
1 维修中心设置的维护监测服务器。
2 车辆段、停车场、各设备集中站、维护部、维修中心、控制中心设置的维护工作站。
3 车辆段设置的微机监测设备。
4 网络传输设备。
3.3 运行控制系统的可靠性、可用性、可维护性和安全性
3.3.1 运行控制系统的可靠性应符合下列规定:
1 列车自动监控(ATS)设备的平均故障间隔时间(MT-BF)不应小于3.5×103h。
2 计算机外围设备的平均故障间隔时间(MTBF)不应小于5.0×104h。
3 电源设备的平均故障间隔时间(MTBF)不应小于1.0×105h。
4 列车自动防护(ATP)、列车自动运行(ATO)地面设备的平均故障间隔时间(MTBF)不应小于1.0×105h。
5 列车自动防护(ATP)、列车自动运行(ATO)车载设备的平均故障间隔时间(MTBF)不应小于1.0×105h。
6 计算机联锁(CI)设备的平均故障间隔时间(MTBF)不应小于1.0×105h。
7 车地通信(TWC)设备的平均故障间隔时间(MTBF)不应小于2.0×104h。
8 维护监测设备的平均故障间隔时间(MTBF)不应小于5.0×104h。
3.3.2 运行控制系统的可用性不应小于99.95%。
3.3.3 运行控制系统的可维护性应符合下列规定:
1 车载设备的平均故障修复时间(MTTR)不应大于30min。
2 控制中心设备的平均故障修复时间(MTTR)不应大于45min。
3 车站设备的平均故障修复时间(MTTR)不应大于45min。
4 轨旁设备的平均故障修复时间(MTTR)不应大于4h。
5 列车自动防护系统和计算机联锁系统应符合《轨道交通通信、信号和处理系统信号用安全相关电子系统》GB/T 28809中SIL4的规定。
3.3.4 列车自动防护系统和计算机联锁系统的设备应符合故障-安全原则。
3.4 运行控制系统的能力
3.4.1 运行控制系统能力应包含监控范围、通过能力、折返能力和降级运用及其复原能力。
3.4.2 运行控制系统监控范围应包括车辆基地出入线、正线车站与区间、停车线和折返线。
3.4.3 运行控制系统控制列车出、入车辆基地的作业能力应与正线列车运行能力相适应。
3.4.4 运行控制系统处理能力应按远期线路规模、最大在线列车数设计,留有不应小于30%的余量。
3.4.5 运行控制系统的响应性能应符合下列规定:
1 列车占用或空闲检测的应变时间不应大于2s。
2 车载设备自接收地面信息至完成处理的时间不应大于0.75s。
3 当车载设备识别到涉及行车安全的故障时,应立即发出紧急制动命令,且延时不应大于0.75s。
4 计算机联锁设备的处理周期不应大于1s。
5 列车自动监控(ATS)系统现场信息采集及处理周期不应大于1s。
6 列车自动监控(ATS)系统实时控制、各工作站及显示终端等的操作响应时间不应大于2s。
3.4.6 运行控制系统的通过能力和折返能力应经列车运行模拟确定。
3.4.7 运行控制系统应能控制列车实现有司机监督或无司机的自动折返作业。列车自动折返的正确率不应小于99.99%。
3.4.8 运行控制系统应具有故障降级运用的模式。
3.4.9 因运行控制系统的原因导致的非期望紧急制动发生率应小于1次/万列车公里。
3.5 运行控制系统的接口
3.5.1 运行控制系统接口宜分为系统与系统间的系统内部接口及系统与车辆、道岔、通信等的外部接口。
3.5.2 运行控制系统安全性接口之间的通信信息传输应符合现行国家标准《轨道交通 通信、信号和处理系统 第1部分:封闭式传输系统中的安全相关通信》GB/T 24339.1和《轨道交通通信、信号和处理系统 第2部分:开放式传输系统中的安全相关通信》GB/T 24339.2的要求。
3.5.3 系统外部接口应为系统与其他机电系统设备的接口,宜包括车辆、道岔、站台门、通信、广播、乘客信息系统接口,电力监控、防灾报警和环境监控或综合监控系统接口。
3.5.4 系统外部接口类型宜包括开关量接口、串行接口、网络接口以及可能的模拟量接口等。计算机联锁系统与道岔、站台屏蔽门的接口,车载列车自动防护(ATP)系统与车辆的接口应采用安全性接口。
3.5.5 计算机联锁系统向道岔输出的开关量信号应包括下列内容:
1 道岔转辙命令;
2 现场授权信号。
3.5.6 道岔向计算机联锁系统输出的开关量信号应包括下列内容:
1 道岔位置表示;
2 现场请求信号;
3 现场状态信号;
4 故障信号。
3.6 环境条件
3.6.1 运行控制系统设备正常工作时的环境条件应符合表3.6.1的要求。
表3.6.1 运行控制系统设备正常工作的环境条件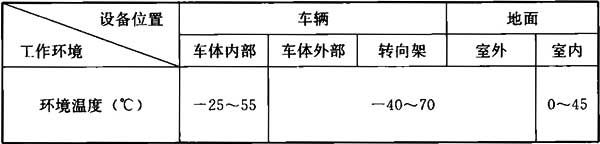

注:当运行控制系统运用于雷暴、降水量、极端气温、湿度等特殊环境条件时,应另行规定附加要求。
3.6.2 运行控制系统设备机房环境应符合现行国家标准《电子计算机机房设计规范》GB 50174的规定。
4 闭塞方式
4.1 一般规定
4.1.1 运行控制系统的闭塞方式应满足行车密度、运行速度和交路等运营组织的需求。
4.1.2 运行控制系统的闭塞方式应保证在最不利情况下列车以规定的安全间隔运行,并应符合现行国家标准《城市轨道交通信号系统通用技术条件》GB/T 12758的规定。
4 闭塞方式
4.1 一般规定
4.1.1 运行控制系统的闭塞方式应满足行车密度、运行速度和交路等运营组织的需求。
4.1.2 运行控制系统的闭塞方式应保证在最不利情况下列车以规定的安全间隔运行,并应符合现行国家标准《城市轨道交通信号系统通用技术条件》GB/T 12758的规定。
4.2 基本功能
4.2.1 运行控制系统应实现列车间隔控制提示。
4.2.2 区域控制器设备应根据区域范围内的列车标识实现列车控制,应通过地面车地通信(TWC)设备向车载设备提供列车标识、移动授权和地面线路状态运行监控所需信息。
4.2.3 车载设备应通过车地通信(TWC)设备向区域控制器设备发送列车位置、列车标识和列车状态运行监控信息。
4.3 技术要求
4.3.1 闭塞系统应通过列车自动防护技术实现列车运行间隔的安全控制。
4.3.2 双线区段宜采用双方向闭塞,也可采用单方向闭塞。单线双方向运行区段,应采用双方向闭塞。
4.3.3 闭塞区段的划分或列车运行安全间隔,应根据列车运行密度、线路条件、车辆特性及系统的列车控制模式、限速等级等条件设置,通过列车运行模拟确定,应符合下列规定:
1 准移动闭塞的列车安全距离,应按前方列车所在闭塞区段入口端为目标地点(危险点),由后续列车以当前速度制动停车所需走行距离加安全保护距离确定。
2 移动闭塞的列车安全距离,宜按前方列车骤然停车,后续列车按当前速度制动停车所需走行距离加安全保护距离确定。
4.3.4 准移动闭塞的地面设备应向车载设备连续提供信息。
4.3.5 移动闭塞的地面和车载设备间应具有双向实时信息传递功能。
5 运行控制系统
5.1 一般规定
5.1.1 运行控制系统宜采用基于通信的移动闭塞或准移动闭塞制式的列车自动控制系统。
5.1.2 运行控制系统应采用连续信息传递和控制。
5.1.3 运行控制系统应实现列车在正线区间、车站、停车线、折返线、列车出入车辆基地线等行车作业的控制、监视。
5.1.4 运行控制系统应能触发列车停车为最高安全准则。执行制动停车控制时,应切断列车牵引,列车停车过程不得中途缓解。
5.1.5 装备列车自动防护(ATP)系统的列车,当出现车地双向连续通信中断、列车完整性电路中断、列车超速、车载设备的重要故障时,车载列车自动防护(ATP)设备均应实施紧急制动停车。当列车运行中车门误开时,车载列车自动防护(ATP)设备应采取报警措施。
5.1.6 装备车载列车自动防护(ATP)设备的列车应能与未装备车载列车自动防护(ATP)设备的列车或故障列车混合运行。
5.1.7 运行控制系统应具备其系统或设备及列车设备运行数据的实时记录功能,数据记录时间不应小于7d。
5.1.8 运行控制系统应具有自动检测、报警和表示功能。车载设备的日检宜通过车载设备自检完成。
5 运行控制系统
5.1 一般规定
5.1.1 运行控制系统宜采用基于通信的移动闭塞或准移动闭塞制式的列车自动控制系统。
5.1.2 运行控制系统应采用连续信息传递和控制。
5.1.3 运行控制系统应实现列车在正线区间、车站、停车线、折返线、列车出入车辆基地线等行车作业的控制、监视。
5.1.4 运行控制系统应能触发列车停车为最高安全准则。执行制动停车控制时,应切断列车牵引,列车停车过程不得中途缓解。
5.1.5 装备列车自动防护(ATP)系统的列车,当出现车地双向连续通信中断、列车完整性电路中断、列车超速、车载设备的重要故障时,车载列车自动防护(ATP)设备均应实施紧急制动停车。当列车运行中车门误开时,车载列车自动防护(ATP)设备应采取报警措施。
5.1.6 装备车载列车自动防护(ATP)设备的列车应能与未装备车载列车自动防护(ATP)设备的列车或故障列车混合运行。
5.1.7 运行控制系统应具备其系统或设备及列车设备运行数据的实时记录功能,数据记录时间不应小于7d。
5.1.8 运行控制系统应具有自动检测、报警和表示功能。车载设备的日检宜通过车载设备自检完成。
5.2 列车驾驶模式
5.2.1 运行控制系统宜按下列顺序采用驾驶模式:
1 非限制人工驾驶;
2 限制人工驾驶;
3 受控人工驾驶;
4 列车自动运行(ATO)驾驶模式;
5 无人驾驶模式。
5.2.2 驾驶模式转换应符合下列规定:
1 当车辆基地未全部纳入运行控制系统监控时,应在系统监控区域与非监控区域的分界处设驾驶模式转换区,驾驶模式转换区的设置应符合下列规定:
1)驾驶模式转换区的运行控制设备应与正线的运行控制设备一致;
2)在驾驶模式转换区域,车载人机设备宜具有将驾驶模式转换至列车自动运行(ATO)驾驶模式或受控人工驾驶模式的提示。
2 驾驶模式转换可自动或手动完成。
3 当驾驶模式由低向高转换时,列车应不停车转换驾驶模式;当驾驶模式由高向低转换时,列车可停车或不停车转换驾驶模式。
4 驾驶模式转换应进行记录和表示。
5 列车的正常运行模式应采用受控人工驾驶模式、列车自动运行(ATO)驾驶模式和无人驾驶模式。
5.2.3 当遇系统故障状态时,经调度员特殊授权并在限定时间内,列车可采用限制人工驾驶模式或非限制人工驾驶模式执行故障运行。
5.3 列车自动监控
5.3.1 列车自动监控(ATS)系统应具有下列基本功能:
1 列车自动识别、列车运行自动跟踪和显示;
2 运行时刻表或运行图的编制及管理;
3 自动和人工排列进路;
4 列车运行调整;
5 列车运行和列车自动防护(ATP)、列车自动运行(ATO)设备状态自动监视;
6 列车运行数据统计、列车运行实迹记录;
7 操作与数据记录、回放、输出及统计处理;
8 列车运行、监控模拟及培训;
9 具有监测、报警和自诊断能力。
5.3.2 列车自动监控(ATS)系统运行调整应采用人工调整和系统自动调整。
5.3.3 列车自动监控(ATS)系统宜具备下列控制方式:
1 控制中心自动控制;
2 控制中心人工控制;
3 车站自动控制;
4 车站人工控制。
5.3.4 人工控制应优先于自动控制,车站自动控制应优先于控制中心自动控制。控制权转换过程中,不应影响设备功能执行和列车运行。
5.3.5 列车自动监控(ATS)系统控制中心具备控制权时,控制项目应包括列车进路的建立或取消、扣车或取消、跳停或取消、临时限速的设置或取消、站停时间人工设置、运行等级人工设置和重复开放信号机。
5.3.6 列车自动监控(ATS)系统车站具备控制权时,控制项目应包括列车进路或引导进路的建立或解锁或取消、信号机的关闭或开放、道岔的单操或单锁、扣车或取消、提前发车、临时限速的设置或取消、控制权转换。
5.3.7 列车自动监控(ATS)系统车辆基地具备控制权时,控制项目应包括列车进路或调车进路的建立或取消、道岔的单独锁闭或单独解锁、重复开放信号机。
5.3.8 列车自动监控(ATS)系统应能监控一条或多条运营线路;当监控多条运营线路时,应具有各条线路具有独立运营或混合运营的能力。
5.3.9 列车自动监控(ATS)系统应根据运行时刻表、列车识别号和联锁表等条件,完成列车进路控制。
5.3.10 列车自动监控(ATS)系统应能与通信、广播和乘客信息系统接口,宜与时钟系统接口,宜与电力监控、防灾报警、环境监控或综合监控系统接口,宜提供与城市轨道交通线网监控系统的接口。
5.4 列车自动防护
5.4.1 列车自动防护(ATP)系统应具有下列基本功能:
1 检测列车位置,实现列车间隔控制;
2 监督列车运行速度,实现列车超速防护控制;
3 防止列车误退行等非预期移动;
4 为列车车门、站台屏蔽门的开闭提供安全监控信息;
5 实现列车车载列车自动防护(ATP)设备自检;
6 记录司机操作和设备运行状况。
5.4.2 列车自动防护(ATP)系统主要控制项目宜包括列车定位、列车测速、列车移动授权、列车完整性检测、列车停车保证、列车运行方向检测、列车超速、列车退行、列车非预期移动、站台的紧急关闭或取消和车门及站台屏蔽门的防护。
5.4.3 列车自动防护(ATP)系统应在车辆基地出入线、区间和车站、折返线范围内具有列车自动防护功能。
5.4.4 列车自动防护(ATP)系统应能监督、限制列车运行速度、控制列车制动停车、记录司机操作和设备运行状况。
5.4.5 列车自动防护(ATP)系统应利用列车定位设备进行精确位置校正。
5.4.6 车载列车自动防护(ATP)设备列车位置测量误差不应大于±2%。
5.4.7 区域控制器(ZC)设备应对驶入控制区域内的新列车进行注册管理、对驶出控制区域的列车进行注销管理,并应对在线路上运行的列车进行移动管理。
5.4.8 区域控制器(ZC)设备应根据控制区域内列车的运行方向,列车当前位置、关键道岔位置及进路等信息确定列车的移动授权,并在其移动授权范围内,实时向列车传递其最近的防护点位置。
5.4.9 列车自动防护(ATP)系统车载设备应能够控制站台屏蔽门与列车车门的联动。当列车依规定停车精度在站台指定停车点停稳后,车载列车自动防护(ATP)设备应同时向地面设备发送站台屏蔽门控制命令。
5.4.10 列车自动防护(ATP)系统车载设备应配置显示、音响报警和故障记录及分析装置。车载人机的应显示列车允许速度、列车实际运行速度、目标距离、目标速度等。
5.4.11 列车可与列车自动防护(ATP)系统共用测速设备,其测速范围应为0~132km/h、显示精度应为±1.0km/h。
5.5 列车自动运行
5.5.1 列车自动运行(ATO)系统应具有下列基本功能:
1 启动列车并实现站间自动运行;
2 控制列车实现车站定点停车和折返作业;
3 与列车自动监控(ATS)系统相结合,实现列车运行间隔自动调整;
4 列车车门和站台屏蔽门的开、闭控制;
5 列车运行节能控制。
5.5.2 列车自动运行(ATO)系统控制项目宜包括列车精确位置校正、列车速度调整、列车定点停车和列车运行计划调整及车门和站台屏蔽门的控制。
5.5.3 列车自动运行(ATO)系统应能提供列车牵引、巡航、惰行、制动等多种工况的速度调整控制,实现运行图规定的站间时间行车,站间行车时间误差不应超过5%。
5.5.4 列车自动运行(ATO)系统应通过列车定位设备进行线路位置校正,并应能控制列车实现站内定点停车。
5.5.5 列车自动运行(ATO)系统应能根据线路条件、道岔状态、目标距离及目标速度信息实现列车速度的自动控制。车站发车时,列车启动应由司机控制。区间停车后,在允许信号的条件下应实现列车的自动启动。
5.5.6 列车自动运行(ATO)系统与列车自动监控(ATS)系统相结合应提供列车运行调整,包括列车跳停、列车扣车、列车停站时间、列车运行等级。
5.5.7 列车自动运行(ATO)系统车载设备应在列车自动防护(ATP)系统车载设备给出门允许条件并判断停准后,自动打开相应侧车门。
5.5.8 列车自动运行(ATO)系统控制列车减速度的变化率不宜大于0.75m/s3,站台定点停车精度宜为±0.3m。
5.5.9 列车以自动运行模式在车站站台的停车精度为±0.3m时,列车停在该停车精度范围内的概率不应小于99.99%;停车精度为±0.5m时,列车停在该停车精度范围内的概率不应小于99.9998%。
5.5.10 列车自动运行(ATO)系统车载设备发生故障时,列车自动防护(ATP)系统车载设备应自动切除列车自动运行(ATO)模式,列车自动转为列车自动防护(ATP)控制。
5.5.11 列车自动运行(ATO)系统应具有记录、报警和自动检测能力。
5.6 列车无人驾驶
5.6.1 列车无人驾驶应符合下列规定:
1 应实现列车进、出车辆基地,正线运行和折返全部运行作业的无人自动驾驶。
2 宜具有系统列车唤醒、列车休眠功能及蠕动驾驶模式。
3 无人驾驶系统故障应保证列车安全停车并可转为ATO或ATP控制。
4 无人驾驶系统应符合本规范第5.5.1条的规定。
5.6.2 无人驾驶系统应实现列车速度的自动控制。列车停车后,在允许信号的条件下应自动实现列车的启动、运行。
5.6.3 列车在站台规定停车位置停车后,应自动开启车门、站台门。若超出规定的停车范围,应自动向有人值守的监控室报告,得到允许开门指令后,方可控制车门开启。
5.6.4 无人驾驶系统其他技术要求应符合本规范第5.5.2~第5.5.11条的规定。
5.7 计算机联锁
5.7.1 计算机联锁(CI)系统应具有下列基本功能:
1 控制道岔、信号机,建立列车或调车进路;
2 具有对室内、外计算机联锁设备的监测和自诊断;
3 显示区段和进路、信号机和道岔状态,遥控或站控等各种表示和声光报警。
5.7.2 计算机联锁(CI)系统主要控制项目宜包括列车进路或引导进路的建立或解锁或取消、信号机的关闭或开放、道岔的单操或单锁、扣车或取消、遥控或站控、临时限速的设置或取消和站台的紧急关闭或取消。
5.7.3 计算机联锁(CI)系统的控制方式和表示宜选用鼠标和显示器方式。操作设备应操作方便、功能明确;一次单一操作不应形成有效操作命令。
5.7.4 计算机联锁系统应能办理列车和调车进路,可实现车站有关进路、端站折返进路的自动排列。
5.7.5 计算机联锁(CI)系统应根据列车自动防护(ATP)系统的要求设置相应的保护进路。
5.7.6 计算机联锁(CI)应能控制道岔实现进路锁闭、区段锁闭及人工锁闭,应能实行单独操纵和进路选动,影响行车效率的联动道岔宜采用同时启动方式。
5.7.7 计算机联锁(CI)系统应确保进路上道岔、信号机和区段的联锁。
5.7.8 车站站台及车站控制室应设站台紧急关闭按钮。站台紧急关闭按钮电路应符合故障-安全原则。
5.7.9 当列车自动防护(ATP)系统处于故障状态时,计算机联锁(CI)可实现自动站间闭塞或者进路闭塞方式的降级模式行车。
5.7.10 计算机联锁(CI)系统应能向列车自动防护(ATP)系统提供信号机状态、道岔状态、进路状态、保护区段状态、运行方向、站台屏蔽门状态、紧急关闭按钮状态、站台无人折返按钮状态信息。
5.8 维护监测系统
5.8.1 维护监测系统应具有下列基本功能:
1 完成对列车运行的监视和整个运行控制系统所有设备的集中报警功能。
2 完成对所有在线运行的运行控制系统设备进行维修支持管理,对操作员所进行的操作、时间、对象、内容、结果等信息进行记录。
5.8.2 维护监测系统应实现对运行控制系统设备运行的工作状态和主要电气性能进行在线监测,电气性能监测宜包括电缆绝缘测试、对地漏泄检测等。当设备的工作状态异常或电气性能偏离预定界限时应及时报警。
5.8.3 列车自动监控(ATS)、列车自动防护(ATP)、列车自动监控(ATO)、计算机联锁(CI)各子系统应具有自身监测报警的功能,故障应能定位到功能板级,除在相应的维护终端上进行现地显示检测和报警外,报警信息应能传至综合维修中心的监测报警设备。
5.8.4 综合维修中心的监测报警设备应能接受、统计和处理整个信号系统的故障报警信息,具备设备故障报警的统计功能和历史数据回放功能,并应能按要求生成所有信号设备报警和各单项设备的日表、月表、季表和年表。在控制中心可通过维护监测子系统的维护工作站实现对整个信号系统的历史数据回放功能。在设备集中站、维修工区的维护工作站应具有历史数据的回放功能。
5.8.5 综合维修中心的监测报警设备应不仅满足对运行控制系统设备的监测报警和统计报表的功能,还应对系统的各设备进行维护信息分析,提出对信号设备的维护管理计划,提供维护支持。
5.8.6 维护监测系统正常工作或故障时,不应影响被监测设备的正常工作。
6 车辆基地
6.1 车辆段
6.1.1 车辆段运行控制系统应设列车自动监控(ATS)设备、计算机联锁(CI)设备、列车占用检测设备、车地通信(TWC)设备、电源设备、试车线设备和培训设备,宜设维护监测设备。
6.1.2 试车线运行控制系统地面设备的布置,应满足车载设备双方向试车,其地面设备应与正线运行控制系统地面设备相同。
6.1.3 运行控制系统可实现车辆段内列车运行的追踪,车辆段可部分或全部纳入运行控制系统的监控范围。
6.1.4 用于培训的运行控制主要设备功能应与实际运用的运行控制设备功能一致。
6 车辆基地
6.1 车辆段
6.1.1 车辆段运行控制系统应设列车自动监控(ATS)设备、计算机联锁(CI)设备、列车占用检测设备、车地通信(TWC)设备、电源设备、试车线设备和培训设备,宜设维护监测设备。
6.1.2 试车线运行控制系统地面设备的布置,应满足车载设备双方向试车,其地面设备应与正线运行控制系统地面设备相同。
6.1.3 运行控制系统可实现车辆段内列车运行的追踪,车辆段可部分或全部纳入运行控制系统的监控范围。
6.1.4 用于培训的运行控制主要设备功能应与实际运用的运行控制设备功能一致。
6.2 停车场
6.2.1 停车场运行控制系统应设列车自动监控(ATS)设备、计算机联锁(CI)设备、列车占用检测设备、车地通信(TWC)设备和电源设备,宜设维护监测设备。
6.2.2 停车场宜部分或全部纳入运行控制系统的监控范围。
7 列车检测与信息传递
7.1 一般规定
7.1.1 列车占用检测设备应能安全、准确地实现列车的占用或空闲检测。
7.1.2 信息传递设备应保证信息安全可靠传递。
7.1.3 列车定位设备应能准确地确定列车的位置和运行方向。
7 列车检测与信息传递
7.1 一般规定
7.1.1 列车占用检测设备应能安全、准确地实现列车的占用或空闲检测。
7.1.2 信息传递设备应保证信息安全可靠传递。
7.1.3 列车定位设备应能准确地确定列车的位置和运行方向。
7.2 基本功能
7.2.1 准移动闭塞系统应实现闭塞区段的列车占用或空闲检测,应以闭塞区段为单元检测列车的位置。
7.2.2 移动闭塞系统应通过列车定位技术及车地信息的双向传递,将列车所在线路上的位置传送至区域控制器,将列车运行控制所需信息传送至车载运行控制设备。
7.3 技术要求
7.3.1 列车占用检测宜通过连续检测或非连续检测方式实现。
7.3.2 列车占用检测、列车定位等技术措施和设备必须符合故障一安全的原则。
7.3.3 列车定位技术宜采用轨旁电缆环线、应答器和辅以列车测速传感器方式。
7.3.4 车地通信系统宜采用轨旁电缆环线方式,也可采用无线通信方式。
7.3.5 基于轨旁电缆环线方式的车地通信系统应符合下列规定:
1 轨旁电缆环线的安装不应影响工务维修,不应影响乘客的紧急疏散。
2 车地通信系统地面设备应具有轨旁电缆环线通道完整性检测和故障报警功能。
3 车地通信车载设备应向车载列车自动防护(ATP)和列车自动监控(ATO)设备提供的环线交叉点精确位置校正信息。
4 轨旁电缆环线室内至室外设备的有效控制距离不宜小于3.0km;单臂传输交叉感应环线的有效控制距离不宜小于0.5km;双臂传输交叉感应环线的有效控制距离不宜小于1.0km。
7.3.6 基于无线通信方式的车地通信系统应符合下列规定:
1 无线通信系统的场强覆盖宜采用天线、漏缆和裂缝波导管方式。
2 无线通信系统应保证列车高速移动时漫游切换,不应影响列车控制的连续性。
3 无线通信系统应采用冗余场强覆盖设计;当一套网络故障时,应确保车地信息传输的连续性。
4 无线通信系统应具有防止外部非法入侵功能,应具有网络加密、认证、识别和防火墙等安全信息防护功能。
5 无线通信系统应与其他系统、其他运营线路统一规划通信的频点。
8 信号显示
8.1 地面信号机显示
8.1.1 地面信号机宜采用发光二极管(LED)型信号机。
8.1.2 信号机应设于列车运行方向的右侧。
8.1.3 信号机的设置应符合下列规定:
1 正线信号机的设置应符合下列规定:
1)车站应设出站信号机;
2)道岔区宜设道岔防护信号机;
3)线路尽头、折返进路终端应设阻挡信号机。
2 车辆基地应设进车辆基地信号机,宜设出车辆基地信号机,车辆基地内应设调车信号机。
3 进车辆基地的信号机和道岔防护信号机宜设引导信号。
8.1.4 按地面信号显示行车时,地面信号机显示距离应符合下列规定:
1 车站出站信号机和道岔防护信号机的显示距离不应小于400m。
2 调车信号机的显示距离不应小于200m。
8.1.5 信号灯光显示的颜色应符合下列规定:
1 正线信号显示应符合下列规定:
1)一个红色灯光表示停车;
2)一个黄色灯光表示道岔已锁闭,并开通侧向;
3)一个绿色灯光表示按规定速度运行;
4)一个黄色灯光加一个红色灯光为引导信号,列车可以不大于25km/h速度越过信号机,并随时准备停车;
5)其他显示意义的信号可采用基本颜色组合或闪光,也可采用符号、数字等形式表示,但均应经运营主管部门批准后方可采用。
2 车辆基地信号显示应符合下列规定:
1)出车辆基地信号机显示应与正线信号机显示一致。当车辆基地部分或全部纳入列车运行控制范围内时,相应控制范围内的信号机及其显示应与正线一致。
2)车辆基地调车信号机宜为蓝、月白二色显示。一个蓝色灯光应表示禁止调车,一个月白色灯光应表示允许调车。
8 信号显示
8.1 地面信号机显示
8.1.1 地面信号机宜采用发光二极管(LED)型信号机。
8.1.2 信号机应设于列车运行方向的右侧。
8.1.3 信号机的设置应符合下列规定:
1 正线信号机的设置应符合下列规定:
1)车站应设出站信号机;
2)道岔区宜设道岔防护信号机;
3)线路尽头、折返进路终端应设阻挡信号机。
2 车辆基地应设进车辆基地信号机,宜设出车辆基地信号机,车辆基地内应设调车信号机。
3 进车辆基地的信号机和道岔防护信号机宜设引导信号。
8.1.4 按地面信号显示行车时,地面信号机显示距离应符合下列规定:
1 车站出站信号机和道岔防护信号机的显示距离不应小于400m。
2 调车信号机的显示距离不应小于200m。
8.1.5 信号灯光显示的颜色应符合下列规定:
1 正线信号显示应符合下列规定:
1)一个红色灯光表示停车;
2)一个黄色灯光表示道岔已锁闭,并开通侧向;
3)一个绿色灯光表示按规定速度运行;
4)一个黄色灯光加一个红色灯光为引导信号,列车可以不大于25km/h速度越过信号机,并随时准备停车;
5)其他显示意义的信号可采用基本颜色组合或闪光,也可采用符号、数字等形式表示,但均应经运营主管部门批准后方可采用。
2 车辆基地信号显示应符合下列规定:
1)出车辆基地信号机显示应与正线信号机显示一致。当车辆基地部分或全部纳入列车运行控制范围内时,相应控制范围内的信号机及其显示应与正线一致。
2)车辆基地调车信号机宜为蓝、月白二色显示。一个蓝色灯光应表示禁止调车,一个月白色灯光应表示允许调车。
8.2 车载信号显示
8.2.1 列车自动防护(ATP)车载设备的车载人机界面应作为列车行车的凭证。列车自动防护(ATP)车载设备故障的列车、未装备列车自动防护(ATP)车载设备的列车及列车自动防护(ATP)地面设备故障情况下降级运行的列车应按地面信号机的指示行车。
8.2.2 车载人机界面的显示应包括驾驶模式、列车允许速度、列车实际运行速度、列车车门状态、车门允许、站台屏蔽门状态、目标速度、目标距离、牵引或制动状态、跳停、扣车、折返表示和列车超速、设备故障及声光报警内容。
9 系统供电
9.1 地面设备供电
9.1.1 运行控制系统设备供电应为一级负荷,应设两路独立电源供电。
9.1.2 运行控制系统设备应采用集中电源和分路馈电方式,其交流电源、直流电源应对地绝缘。
9.1.3 运行控制系统设备应采用不间断电源,并由专用的电源屏供电。
9.1.4 电源屏应采用智能电源屏设备。
9.1.5 电源屏应具有主副电源自动和手动切换装置,两路电源的切换时间不应大于0.15s。
9.1.6 控制中心、设备集中站及轨旁设备的后备供电时间应相等,后备时间不宜小于30min。
9.1.7 电源容量不应小于最大负荷的130%。
9.1.8 电源设备主要功能单元宜采用模块化结构。
9.1.9 电源设备宜实现各模块及主要元器件工作状态的定时或实时在线监测,电源设备监测信息应纳入维护监测系统。
9 系统供电
9.1 地面设备供电
9.1.1 运行控制系统设备供电应为一级负荷,应设两路独立电源供电。
9.1.2 运行控制系统设备应采用集中电源和分路馈电方式,其交流电源、直流电源应对地绝缘。
9.1.3 运行控制系统设备应采用不间断电源,并由专用的电源屏供电。
9.1.4 电源屏应采用智能电源屏设备。
9.1.5 电源屏应具有主副电源自动和手动切换装置,两路电源的切换时间不应大于0.15s。
9.1.6 控制中心、设备集中站及轨旁设备的后备供电时间应相等,后备时间不宜小于30min。
9.1.7 电源容量不应小于最大负荷的130%。
9.1.8 电源设备主要功能单元宜采用模块化结构。
9.1.9 电源设备宜实现各模块及主要元器件工作状态的定时或实时在线监测,电源设备监测信息应纳入维护监测系统。
9.2 车载设备供电
9.2.1 车载运行控制设备的电源应采用车上电源直接或经变流设备供电,并应设过压和过流保护。
9.2.2 车载运行控制设备的电源容量不应小于最大负荷的130%。
9.2.3 车载运行控制主机设备的电源和人机设备的电源应分别设置断路器。
10 系统的电磁兼容与防护
10.1 电磁兼容
10.1.1 运行控制系统地面设备的发射与抗扰度限值、性能判据应符合现行国家标准《轨道交通 电磁兼容 第4部分:信号和通信设备的发射与抗扰度》GB/T 24338.5的规定。
10.1.2 运行控制系统车载设备的发射与抗扰度限值、性能判据应符合现行国家标准《轨道交通 电磁兼容 第3-2部分:机车车辆设备》GB/T 24338.4的规定。
10.1.3 运行控制系统地面供电装置和设备的发射与抗扰度限值、性能判据应符合现行国家标准《轨道交通 电磁兼容 第5部分:地面供电装置和设备的发射与抗扰度》GB/T 24338.6的规定。
10 系统的电磁兼容与防护
10.1 电磁兼容
10.1.1 运行控制系统地面设备的发射与抗扰度限值、性能判据应符合现行国家标准《轨道交通 电磁兼容 第4部分:信号和通信设备的发射与抗扰度》GB/T 24338.5的规定。
10.1.2 运行控制系统车载设备的发射与抗扰度限值、性能判据应符合现行国家标准《轨道交通 电磁兼容 第3-2部分:机车车辆设备》GB/T 24338.4的规定。
10.1.3 运行控制系统地面供电装置和设备的发射与抗扰度限值、性能判据应符合现行国家标准《轨道交通 电磁兼容 第5部分:地面供电装置和设备的发射与抗扰度》GB/T 24338.6的规定。
10.2 防雷与接地
10.2.1 运行控制系统设备应具有雷电感应过电压防护,并应符合下列规定:
1 雷电防护电路应符合现行国家标准《城市轨道交通信号系统通用技术条件》GB/T 12758相关的规定。
2 雷电防护电路不应影响运行控制系统设备的正常工作。
3 防雷元器件与运行控制系统设备之间的连接线应最短,防护电路的配线应与其他配线分开,其他设备不应借用防雷元器件的端子。
4 运行控制系统高架和地面线的轨旁设备、与隧道以外连接的室内设备应具有雷电防护措施。
10.2.2 运行控制系统设备的接地应符合下列规定:
1 运行控制系统设备应设工作地线、保护地线、屏蔽地线和防雷地线。
2 运行控制系统设备室应设主接地板,并通过主接地板接地。
3 运行控制系统室外设备的金属箱、壳体应接地。
4 运行控制系统车载设备的地线应经车辆的接地装置接地。
5 运行控制系统设备宜采用综合接地系统,其接地电阻不应大于1.0Ω。
10.2.3 运行控制系统设备的设置与接触轨、回流轨带电部分之间的安全距离应符合现行国家标准《地铁设计规范》GB 50157的规定。运行控制系统电缆线路与电力线路应分开敷设,交叉敷设时运行控制系统电缆线路应采取防护措施,敷设间距应符合现行国家标准《地铁设计规范》GB 50157的规定。
10.2.4 运行控制系统室内设备的防雷应符合现行国家标准《建筑物电子信息系统防雷技术规范》GB 50343的规定。
10.2.5 运行控制系统和设备的防雷应符合现行行业标准《铁道信号设备雷电电磁脉冲防护技术条件》TB/T 3074的规定。
11 检测和验收
11.1 检 测
11.1.1 信号机的检测应符合现行国家标准《城市轨道交通信号工程施工质量验收规范》GB 50578的要求。
11.1.2 感应环线设备的检测应符合下列规定:
1 感应环线设备各项参数指标应符合设计要求。
2 感应环线地对车通信和车对地通信应正确及时。
3 感应环线的断线状态报警功能应符合设计要求。
11.1.3 电源(含UPS)设备的检测应符合现行国家标准《城市轨道交通信号工程施工质量验收规范》GB 50578的要求。
11.1.4 计算机联锁(CI)系统的检测应符合下列规定:
1 进路联锁表中所有进路的建立及取消、信号机开放与关闭、进路锁闭与解锁的试验,应保证联锁条件正确并符合设计要求。
2 装设引导信号的信号机因故不能开放时,应通过引导信号实现列车的引导作业。
3 室内、外设备状态一致性调试应符合设计要求。
4 正线与车辆基地间的接口测试及功能检测应符合设计要求。
5 与其他系统接口的测试及功能检测应符合设计要求。
6 故障报警信号应及时、准确、可靠。
7 系统应对控制台按钮操作、联锁室内外设备动作、系统命令输出、故障报警等信息进行记录。
11.1.5 列车自动防护(ATP)系统的检测应符合下列规定:
1 车地通信功能应符合设计要求,地面设备与车载设备信息交换应及时、准确。
2 列车驾驶模式监控功能应符合设计要求。
3 列车速度控制功能应符合设计要求。
4 列车紧急停车功能应符合设计要求,按下车站紧急关闭按钮时,应能立即切断相应范围的速度命令及有关信号机的开放电路,并使列车立即紧急停车。
5 列车车门安全控制功能应符合设计要求。
6 站台屏蔽门自动控制功能应符合设计要求。
7 列车折返功能应符合设计要求,折返作业时,应具有完整的列车自动防护(ATP)功能。
8 故障报警功能应符合设计要求。
9 与其他系统接口的测试及功能检测应符合设计要求。
11.1.6 列车自动运行(ATO)系统的检测应符合下列规定:
1 列车自动运行(ATO)系统在车载列车自动防护(ATP)主机或备机运行时应正常。
2 列车控制功能应符合设计要求。
3 列车自动折返功能应符合设计要求,停车精度应满足停站、折返和存车作业的要求。
4 车门/站台屏蔽门自动控制功能应符合设计要求。
5 列车自动运行正点率的统计测试指标应符合设计要求。
6 故障报警功能应符合设计要求。
7 车地通信功能应符合设计要求,地面设备与车载设备信息交换应及时、准确。
11.1.7 列车无人驾驶系统的检测应符合下列规定:
1 驾驶模式及驾驶模式转换功能应符合设计要求。
2 列车自动唤醒、遥控唤醒、自动休眠和遥控休眠功能应符合设计要求。
3 列车自动进、出车辆基地功能应符合设计要求。
4 列车正线自动运行、自动折返功能应符合设计要求。
5 列车车站自动开关车门及车门和站台屏蔽门联动功能应符合设计要求。
6 列车区间停车,自动启动功能应符合设计要求。
7 列车蠕动驾驶功能应符合设计要求。
8 与地面设备正确交互信息功能应符合设计要求。
11.1.8 列车自动监控(ATS)系统的检测应符合下列规定:
1 操作模式功能应符合设计要求。
2 列车运行自动和人工调整功能应符合设计要求。
3 工作站运行模式功能应符合设计要求。
4 信号控制功能应符合设计要求。
5 自动进路功能应符合设计要求。
6 列车描述功能应符合设计要求,应验证车次号的设置、修改、移动、取消以及对车次号的跟踪。
7 列车折返功能应符合设计要求。
8 列车运行间隔和折返时间测试功能应符合设计要求。
9 列车运行时刻表的编制及管理功能应符合设计要求。
10 站台控制功能应符合设计要求。
11 列车跳停功能应符合设计要求,应验证列车对已设置了跳停的车站应能自动通过。
12 各种运营报告的打印功能应符合设计要求。
13 报警和事件管理功能应符合设计要求。
14 根据不同类别和等级的职权范围,对不同用户提供可登录管理功能应符合设计要求,不同类别和等级的用户应包括主任调度员、调度员、超级用户、列车自动监控(ATS)系统车站分机操作员、维护员和计划员等。
15 控制中心、车站控制权转换功能应符合设计要求。
16 列车自动监控(ATS)与其他系统的接口功能测试应符合设计要求。
17 系统模拟培训功能应符合设计要求。
11.1.9 运行控制系统应进行下列项目的综合检测,并应符合设计规定:
1 列车自动防护(ATP)、列车自动运行(ATO)、列车自动监控(ATS)系统和计算机联锁(CI)接口性能的测试。
2 正常进路的行车试验。
3 系统运营能力检测。
4 运行控制系统可靠性、可用性指标检测应满足144h系统无故障运行要求。
5 系统降级运行功能应符合设计要求。
11.1.10 运行控制系统试运行应符合下列规定:
1 试运行时间不应小于3个月,试运行最后20日应按照试运营开通时列车运行图行车。
2 试运行最后20日,运行控制系统运营指标应符合现行国家标准《城市轨道交通试运营基本条件》GB/T 30013的规定。
11 检测和验收
11.1 检 测
11.1.1 信号机的检测应符合现行国家标准《城市轨道交通信号工程施工质量验收规范》GB 50578的要求。
11.1.2 感应环线设备的检测应符合下列规定:
1 感应环线设备各项参数指标应符合设计要求。
2 感应环线地对车通信和车对地通信应正确及时。
3 感应环线的断线状态报警功能应符合设计要求。
11.1.3 电源(含UPS)设备的检测应符合现行国家标准《城市轨道交通信号工程施工质量验收规范》GB 50578的要求。
11.1.4 计算机联锁(CI)系统的检测应符合下列规定:
1 进路联锁表中所有进路的建立及取消、信号机开放与关闭、进路锁闭与解锁的试验,应保证联锁条件正确并符合设计要求。
2 装设引导信号的信号机因故不能开放时,应通过引导信号实现列车的引导作业。
3 室内、外设备状态一致性调试应符合设计要求。
4 正线与车辆基地间的接口测试及功能检测应符合设计要求。
5 与其他系统接口的测试及功能检测应符合设计要求。
6 故障报警信号应及时、准确、可靠。
7 系统应对控制台按钮操作、联锁室内外设备动作、系统命令输出、故障报警等信息进行记录。
11.1.5 列车自动防护(ATP)系统的检测应符合下列规定:
1 车地通信功能应符合设计要求,地面设备与车载设备信息交换应及时、准确。
2 列车驾驶模式监控功能应符合设计要求。
3 列车速度控制功能应符合设计要求。
4 列车紧急停车功能应符合设计要求,按下车站紧急关闭按钮时,应能立即切断相应范围的速度命令及有关信号机的开放电路,并使列车立即紧急停车。
5 列车车门安全控制功能应符合设计要求。
6 站台屏蔽门自动控制功能应符合设计要求。
7 列车折返功能应符合设计要求,折返作业时,应具有完整的列车自动防护(ATP)功能。
8 故障报警功能应符合设计要求。
9 与其他系统接口的测试及功能检测应符合设计要求。
11.1.6 列车自动运行(ATO)系统的检测应符合下列规定:
1 列车自动运行(ATO)系统在车载列车自动防护(ATP)主机或备机运行时应正常。
2 列车控制功能应符合设计要求。
3 列车自动折返功能应符合设计要求,停车精度应满足停站、折返和存车作业的要求。
4 车门/站台屏蔽门自动控制功能应符合设计要求。
5 列车自动运行正点率的统计测试指标应符合设计要求。
6 故障报警功能应符合设计要求。
7 车地通信功能应符合设计要求,地面设备与车载设备信息交换应及时、准确。
11.1.7 列车无人驾驶系统的检测应符合下列规定:
1 驾驶模式及驾驶模式转换功能应符合设计要求。
2 列车自动唤醒、遥控唤醒、自动休眠和遥控休眠功能应符合设计要求。
3 列车自动进、出车辆基地功能应符合设计要求。
4 列车正线自动运行、自动折返功能应符合设计要求。
5 列车车站自动开关车门及车门和站台屏蔽门联动功能应符合设计要求。
6 列车区间停车,自动启动功能应符合设计要求。
7 列车蠕动驾驶功能应符合设计要求。
8 与地面设备正确交互信息功能应符合设计要求。
11.1.8 列车自动监控(ATS)系统的检测应符合下列规定:
1 操作模式功能应符合设计要求。
2 列车运行自动和人工调整功能应符合设计要求。
3 工作站运行模式功能应符合设计要求。
4 信号控制功能应符合设计要求。
5 自动进路功能应符合设计要求。
6 列车描述功能应符合设计要求,应验证车次号的设置、修改、移动、取消以及对车次号的跟踪。
7 列车折返功能应符合设计要求。
8 列车运行间隔和折返时间测试功能应符合设计要求。
9 列车运行时刻表的编制及管理功能应符合设计要求。
10 站台控制功能应符合设计要求。
11 列车跳停功能应符合设计要求,应验证列车对已设置了跳停的车站应能自动通过。
12 各种运营报告的打印功能应符合设计要求。
13 报警和事件管理功能应符合设计要求。
14 根据不同类别和等级的职权范围,对不同用户提供可登录管理功能应符合设计要求,不同类别和等级的用户应包括主任调度员、调度员、超级用户、列车自动监控(ATS)系统车站分机操作员、维护员和计划员等。
15 控制中心、车站控制权转换功能应符合设计要求。
16 列车自动监控(ATS)与其他系统的接口功能测试应符合设计要求。
17 系统模拟培训功能应符合设计要求。
11.1.9 运行控制系统应进行下列项目的综合检测,并应符合设计规定:
1 列车自动防护(ATP)、列车自动运行(ATO)、列车自动监控(ATS)系统和计算机联锁(CI)接口性能的测试。
2 正常进路的行车试验。
3 系统运营能力检测。
4 运行控制系统可靠性、可用性指标检测应满足144h系统无故障运行要求。
5 系统降级运行功能应符合设计要求。
11.1.10 运行控制系统试运行应符合下列规定:
1 试运行时间不应小于3个月,试运行最后20日应按照试运营开通时列车运行图行车。
2 试运行最后20日,运行控制系统运营指标应符合现行国家标准《城市轨道交通试运营基本条件》GB/T 30013的规定。
11.2 验 收
11.2.1 运行控制系统工程施工质量验收应包括与车辆、道岔、站台屏幕门、通信、广播、乘客信息系统接口,电力监控、防灾报警和环境监控或综合监控系统的接口验收。
11.2.2 运行控制系统工程施工质量验收应符合现行国家标准《城市轨道交通信号工程施工质量验收规范》GB 50578的规定。
本规范用词说明
1 为便于在执行本规范条文时区别对待,对于要求严格程度不同的用词说明如下:
1)表示很严格,非这样做不可的:
正面词采用“必须”,反面词采用“严禁”;
2)表示严格,在正常情况均应这样做的:
正面词采用“应”,反面词采用“不应”或“不得”;
3)表示允许稍有选择,在条件许可时首先应这样做的:
正面词采用“宜”,反面词采用“不宜”;
4)表示有选择,在一定条件下可以这样做的用词,采用“可”。
2 条文中指明应按其他有关标准执行的写法为:“应符合……的规定”或“应按……执行”。
引用标准名录
1 《地铁设计规范》GB 50157
2 《电子计算机机房设计规范》GB 50174
3 《建筑物电子信息系统防雷技术规范》GB 50343
4 《城市轨道交通信号工程施工质量验收规范》GB 50578
5 《城市轨道交通信号系统通用技术条件》GB/T 12758
6 《轨道交通 电磁兼容 第3-2部分:机车车辆 设备》GB/T 24338.4
7 《轨道交通 电磁兼容 第4部分:信号和通信设备的发射与抗扰度》GB/T 24338.5
8 《轨道交通 电磁兼容 第5部分:地面供电装置和设备的发射与抗扰》GB/T 24338.6
9 《轨道交通 通信、信号和处理系统 第1部分:封闭式传输系统中的安全相关通信》GB/T 24339.1
10 《轨道交通 通信、信号和处理系统 第2部分:开放式传输系统中的安全相关通信》GB/T 24339.2
11 《轨道交通通信、信号和处理系统 信号用安全相关电子系统》GB/T 28809
12 《城市轨道交通试运营基本条件》GB/T 30013
13 《铁道信号设备雷电电磁脉冲防护技术条件》TB/T 3074
中华人民共和国行业标准
中低速磁浮交通运行控制技术规范
CJJ/T 255-2017
条文说明
编制说明
《中低速磁浮交通运行控制技术规范》CJJ/T 255-2017,经住房和城乡建设部2017年4月11日以第1521号公告批准、发布。
本规范编制过程中,广泛调研和分析了我国轨道交通运行控制的技术要求、经验总结和其他相关资料,总结了我国开展中低速磁浮交通运行控制技术的研究、试验成果。同时,参考了国外先进技术成果,吸收了国内城市轨道交通运行控制的先进理念和最新研究成果,通过调研、征求意见及专家咨询,取得了重要技术参数。
为便于广大设计、施工、科研、学校等单位有关人员在使用本规范时能正确理解和执行条文规定,《中低速磁浮交通运行控制技术规范》编制组按章、节、条顺序编制了本规范的条文说明,对条文规定的目的,依据以及执行中需要注意的相关事项进行说明。但是本条文说明不具备与规范正文同等的法律效力,仅供使用者作为理解和把握规范的参考。
1 总 则
1.0.1 本条体现了运行控制系统的作用。运行控制系统技术的发展是在不断改进行车指挥水平、参与运营管理、提高行车效率及保证列车运行安全的过程中而发展的。
1.0.2 根据《中低速磁浮交通车辆通用技术条件》CJJ/T 375-2011,中低速磁浮交通车辆的定义为:采用常导电磁悬浮技术实现悬浮导向,通过直线感应电机实现牵引和电制动,最高运行速度120km/h的车辆。
1.0.3 为了保证运行控制系统标准的符合性,故要求运行控制系统还应符合现行国家的有关标准的规定。
2 术 语
本章收编的术语为运行控制系统领域的主要术语。术语采用的具体词汇和解释,遴选了国内常用的中、英文词汇和释义。部分引自国家标准《城市轨道交通工程基本术语标准》GB/T 50833-2012、《可靠性、维修性术语》GB/T 3187-1994和《城市轨道交通信号系统通用技术条件》GB/T 12758-2004。
3 基本规定
3.1 一般要求
3.1.1 列车自动防护(ATP)系统、计算机联锁(CI)系统是运行控制系统的安全核心,是保证行车安全的设备,为保证列车和乘客安全,要求中低速磁浮轨道交通系统必须配备列车自动防护(ATP)系统和计算机联锁(CI)系统。但根据系统功能实施的需要,当系统配置有站台屏蔽门设备时,应配备列车自动运行(ATO)系统。
3.1.2 运行控制系统的车载设备遵循车辆限界、地面设备遵循设备限界,是保证列车运行、乘客人身安全和运行设备安全的需求。
3.1.3 运行控制系统设备在城市轨道交通环境使用,故应符合城市轨道交通使用环境的要求,使用环境包括温度和湿度、振动、电磁辐射等。为了符合城市轨道交通建设规划。故要求设于高架线路或地面线路的运行控制设备应与城市景观相协调。
3.1.4 为了实现工程生命周期内价值最大化,故作此条规定。设计使用年限是指在一般维护条件下,能保证系统安全正常使用的最低时段。
3.1.5 运行控制系统是保证行车安全的系统,故要求采用满足功能及安全可靠要求的产品。
3.1.6 根据《城市轨道交通基于通信的列车自动控制系统技术要求》CJ/T 407-2012,列车自动防护(ATP)系统的速度曲线应遵从安全制动模型,保证在任何情况下装载列车自动防护(ATP)系统车载设备的列车不应超过限制速度和移动授权。安全制动模型至少包括下列因素:
1)前行列车的位置不确定性;
2)本车跟踪位置的不确定性;
3)列车长度;
4)列车编组;
5)列车自动防护(ATP)系统车载设备测速误差;
6)列车自动防护(ATP)系统车载设备的反应时间;
7)列车的最大加速度;
8)系统在检测到超速时,从切除牵引到紧急制动施加并生效前的最大响应时间;
9)最不利情况下的列车制动率;
10)线路坡度。最不利条件是指安全制动模型的因素取值用最不利条件下的取值。
3.1.7 为了保护生态环境,运行控制系统应符合环境保护的规定;电磁兼容性能应符合本规范10.1的规定。
3.1.8 故障-安全是运行控制系统安全技术追求的目标。故障-安全的原则贯穿于运行控制系统或设备的全生命周期之中,与产品的研发、设计、制造及运用的全过程相关。在运行控制系统中,列车自动防护(ATP)系统和计算机联锁(CI)系统属于涉及行车安全的系统。
3.1.9 为了提高运行控制系统的维护水平,缩短维修时间,故作此条规定。
3 基本规定
3.1 一般要求
3.1.1 列车自动防护(ATP)系统、计算机联锁(CI)系统是运行控制系统的安全核心,是保证行车安全的设备,为保证列车和乘客安全,要求中低速磁浮轨道交通系统必须配备列车自动防护(ATP)系统和计算机联锁(CI)系统。但根据系统功能实施的需要,当系统配置有站台屏蔽门设备时,应配备列车自动运行(ATO)系统。
3.1.2 运行控制系统的车载设备遵循车辆限界、地面设备遵循设备限界,是保证列车运行、乘客人身安全和运行设备安全的需求。
3.1.3 运行控制系统设备在城市轨道交通环境使用,故应符合城市轨道交通使用环境的要求,使用环境包括温度和湿度、振动、电磁辐射等。为了符合城市轨道交通建设规划。故要求设于高架线路或地面线路的运行控制设备应与城市景观相协调。
3.1.4 为了实现工程生命周期内价值最大化,故作此条规定。设计使用年限是指在一般维护条件下,能保证系统安全正常使用的最低时段。
3.1.5 运行控制系统是保证行车安全的系统,故要求采用满足功能及安全可靠要求的产品。
3.1.6 根据《城市轨道交通基于通信的列车自动控制系统技术要求》CJ/T 407-2012,列车自动防护(ATP)系统的速度曲线应遵从安全制动模型,保证在任何情况下装载列车自动防护(ATP)系统车载设备的列车不应超过限制速度和移动授权。安全制动模型至少包括下列因素:
1)前行列车的位置不确定性;
2)本车跟踪位置的不确定性;
3)列车长度;
4)列车编组;
5)列车自动防护(ATP)系统车载设备测速误差;
6)列车自动防护(ATP)系统车载设备的反应时间;
7)列车的最大加速度;
8)系统在检测到超速时,从切除牵引到紧急制动施加并生效前的最大响应时间;
9)最不利情况下的列车制动率;
10)线路坡度。最不利条件是指安全制动模型的因素取值用最不利条件下的取值。
3.1.7 为了保护生态环境,运行控制系统应符合环境保护的规定;电磁兼容性能应符合本规范10.1的规定。
3.1.8 故障-安全是运行控制系统安全技术追求的目标。故障-安全的原则贯穿于运行控制系统或设备的全生命周期之中,与产品的研发、设计、制造及运用的全过程相关。在运行控制系统中,列车自动防护(ATP)系统和计算机联锁(CI)系统属于涉及行车安全的系统。
3.1.9 为了提高运行控制系统的维护水平,缩短维修时间,故作此条规定。
3.2 运行控制系统的构成
3.2.1 列车自动防护(ATP)系统作为列车自动防护的概念包括列车运行的速度和间隔控制、安全防护及进路安全防护两大类。根据列车自动防护(ATP)名词定义,列车运行的速度和间隔控制的安全防护,可称之为列车超速防护。进路的安全防护也属于列车自动防护(ATP)系统的功能,进路的安全防护功能主要由联锁设备完成,因此可以解释列车自动防护(ATP)系统由列车超速防护系统和联锁系统组成。为了描述方便以及结合国内的现状,将联锁从列车自动防护系统中分解,独立成单一系统,对于ATC系统功能的完整性也是可行的。本规范运行控制系统由列车自动监控(ATS)、列车自动防护(ATP)、列车自动运行(ATO)、计算机联锁(CI)四个系统构成的原则分类。为了使运行控制系统易于维护,故要求运行控制系统中设置维护监测系统,实现对运行控制系统设备状态的实时监督和故障报警。及时发现和处理故障。
3.2.2 为了满足中低速磁浮交通列车安全运行的要求,故作此条规定。根据《轨道交通 通信、信号和处理系统 第1部分:封闭式传输系统中的安全相关通信》GB/T 24339.1-2009中3.2,封闭式传输系统定义为:连接的设备数量固定或最大数量固定,有已知且固定的特性的传输系统,对于此系统可以忽略非法访问的风险。
3.2.3 根据运行控制系统的设备位置将运行控制系统作此分类。
3.2.5 第3款 区域控制器站间通信的传输内容属于安全信息,故要求采用独立的通信通道,并冗余配置。
3.2.5 第4款 列车自动防护(ATP)系统涉及行车安全,所以要求区域控制器(ZC)和列车自动防护(ATP)系统车载计算机宜采用二乘二取二或三取二冗余结构。
3.2.6 为了提高列车无人驾驶系统设备的可靠性,减少需要人工介入的故障,故要求列车自动运行(ATO)系统设备应采用冗余结构。
3.2.7 第2款 计算机联锁(CI)系统涉及行车安全,所以要求联锁计算机宜采用二乘二取二或三取二冗余结构。
第3款 计算机联锁(CI)系统站间通信的传输内容属于安全信息,故要求采用独立的通信通道,并冗余配置。
3.3 运行控制系统的可靠性、可用性、可维护性和安全性
3.3.1 运行控制系统的可靠性指标见《城市轨道交通基于通信的列车自动控制系统技术要求》CJ/T 407-2012附录A中规定。
3.3.2 运行控制的“可用性”是运行控制系统的实际运行时间与计划运行时间的百分比。可用性是运行控制系统的一个重要特性,它可以表征运行控制系统“可用于”运行的总时间。在可用性分析时,由于可以分析出运行控制系统MTBF和MTTR,故可利用MTBF和MTTR来计算系统可用性。运行控制系统的可用性A(Availability)可根据下列方程式进行分析:

式中:A——表示系统可用性;
MUT——表示平均工作时间;
MDT——表示平均不工作时间。
3.3.3 MTTR指系统由故障运行模式或失效模式发生的瞬间,修复到系统全功能模式的瞬间所用的全部时间。该时间包括系统故障报警,维修人员赶到现场,故障诊断,故障排除,系统调试,系统重启动,至系统全功能运行为止。
3.3.4 列车自动防护系统是运行控制系统的安全核心,是保证行车安全的设备,所以要求列车自动防护子系统的安全完整性等级应达到4级。根据《轨道交通 通信、信号和处理系统 信号用安全相关电子系统》GB/T 28809-2012附录A.5,安全完整性等级4级的要求为:10-9≤THR<10-8。其中THR为每功能每小时容许危害率。
3.4 运行控制系统的能力
3.4.1 为了正确、全面地描述运行控制系统的能力,本条文规定了运行控制系统能力的范围。
3.4.2 车辆基地出入线、正线车站与区间、停车线和折返线与运行控制系统的通过能力、折返能力密切相关,故要求纳入运行控制系统的监控范围。
3.4.3 列车出、入车辆基地的作业能力会影响到正线列车的数量及列车运行能力,故要求其与正线列车运行能力相适应。
3.4.4 在《地铁设计规范》GB 50157-2013的17.2.8中,要求“ATC系统监控和管理的列车数量应按最小追踪间隔能力所需列车数量设计,并应留有不小于30%的余量”。本条参考上述标准取值。
3.4.5 为了满足运行控制系统实时性的要求,故对运行控制系统的响应性能作出规定。参数取值参照了《城市轨道交通信号系统通用技术条件》GB/T 12758-2004 5.5.6相关规定。根据近年来技术的发展以及控制要求的提高,列车占用或空闲检测的应变时间从不应大于3s修改为不应大于2s。
3.4.6 通过能力和折返能力与线路参数、车辆性能、道岔限速及运行控制系统技术水平和应用设计水平等因素有关,其能力应经仿真计算和仿真列车运行模拟确定。当仿真模拟结果不能满足用户需求时,应考虑对线路参数、车辆性能、道岔限速及运行控制系统技术能力和应用设计等条件提出调整。
3.4.7 在《城市轨道交通基于通信的列车自动控制系统技术要求》CJ/T 407-2012附录B中,要求列车实现无人自动折返的正确率不小于99.99%,本条参照上述标准取值。
3.4.8 运行控制系统故障降级运用指系统由自动控制降级为人工控制,由中心控制变为车站控制,由全部实现功能至仅完成部分功能等降级运用模式。在当前的技术状态下,MATC系统、设备故障可导致较大运营混乱,因此系统应考虑系统后退运行方式及完善的故障恢复功能。降级及其具体要求应根据用户需要,系统设备的可靠性、可用性和安全性等因素确定。
3.4.9 在《城市轨道交通基于通信的列车自动控制系统技术要求》CJ/T 407-2012附录B中,要求非期望紧急制动发生率小于1.5次/万列车公里;在《城市轨道交通试运营基本条件》GB/T 30013-2013的4.5.3中,要求信号系统的故障率不应高于1次/万列车公里,故本规范要求因运行控制系统的原因导致的非期望紧急制动发生率应小于1次/万列车公里。
3.5 运行控制系统的接口
3.5.1 为了正确地描述和区分运行控制系统的接口,将运行控制系统内部设备间的接口划分为系统内部接口,将运行控制系统与其他系统设备间的接口划分为系统外部接口。
3.5.2 在城市轨道交通中,无线通信、环线通信已经在运行控制系统得到应用,为了满足通信信息传输的安全性要求,故要求运行控制系统安全性接口之间的通信信息传输符合《轨道交通 通信、信号和处理系统 第1部分:封闭式传输系统中的安全相关通信》GB/T 24339.1-2009和《轨道交通 通信、信号和处理系统第2部分:开放式传输系统中的安全相关通信》GB/T 24339.2-2009的要求。
3.5.3 根据运行控制系统与其他机电系统设备的连接关系,本条规定了运行控制系统的外部接口范围。
3.5.4 根据运行控制系统与其他机电设备之间传递的信息是否包含涉及行车安全的信息,本条规定了外部安全性接口的范围。计算机联锁(CI)系统与道岔、站台屏幕门的接口信息涉及行车安全,故要求这些接口应采用安全性接口。列车自动防护(ATP)系统与车辆的部分接口信息涉及行车安全,故要求涉及行车安全的接口采用安全性接口。
3.5.5、3.5.6 根据试验线工程实践,规定了计算机联锁(CI)和道岔的开关量接口。道岔操作命令和道岔位置表示根据道岔的类型变化,单开道岔,道岔转辙命令包括道岔定位操作命令和道岔反位操作命令,道岔位置表示包括道岔定位表示和道岔反位表示。
3.6 环境条件
3.6.1 运行控制系统环境条件参照《城市轨道交通信号系统通用技术条件》GB/T 12758-2004中15.1。海拔高度参照《中低速磁浮交通车辆通用技术条件》CJ/T 375-2011。
4 闭塞方式
4.1 一般要求
4.1.1 运行控制系统是与行车效率直接相关的重要系统,通常最大客运输送能力处于远期,但随着线网的形成,最大客流量也可能处于其他时期,需引起注意。此外,客流量大、突发客流强度大是其客运特点,根据不同运营阶段客流增长的需求,根据线路客流分布不均的特点,信号系统必然要适应大运量客流、高密度行车、不同列车编组及行车交路变化的要求。
4 闭塞方式
4.1 一般要求
4.1.1 运行控制系统是与行车效率直接相关的重要系统,通常最大客运输送能力处于远期,但随着线网的形成,最大客流量也可能处于其他时期,需引起注意。此外,客流量大、突发客流强度大是其客运特点,根据不同运营阶段客流增长的需求,根据线路客流分布不均的特点,信号系统必然要适应大运量客流、高密度行车、不同列车编组及行车交路变化的要求。
4.2 基本功能
4.2.1 间隔控制是ATP系统的基本功能,涉及行车安全,故作此条规定。
4.2.2 区域控制器是实现ATP功能的地面设备,区域控制器向车载设备发送列车的移动授权和地面线路信息,车载设备根据安全制动模型生成防护曲线并进行监控,从而实现列车运行的间隔控制。
4.2.3 车载设备向区域控制器提供列车位置和状态信息,区域控制器根据线路上列车的位置和线路状态,生成列车的移动授权并发送给车载设备,从而实现列车运行的间隔控制。
4.3 技术要求
4.3.1 闭塞系统的列车运行间隔安全控制功能通过列车自动防护系统和计算机联锁系统实现,故作此条规定。
4.3.3 安全保护距离涉及系统控制方式、技术指标、列车速度、车辆性能和线路状态等多种因素,是安全行车必备要素。安全保护距离取值主要是在一定的速度条件下,设定的紧急制动距离和有保证的(最不利条件下)紧急制动距离之差。采用准移动闭塞的安全防护距离应增加列车尾车附加距离,移动闭塞系统应考虑前方列车位置的不确定性等因素。
4.3.4 准移动闭塞系统中,可以通过列车检测设备得到列车的位置信息,后车的移动授权危险点是前方列车所在闭塞区段的入口端,地面设备根据列车的位置信息生成列车的移动授权,故要求地面设备向车载设备连续提供信息。
4.3.5 移动闭塞系统后车追踪的危险点是前行列车的尾部,故要求地面和车载设备之间具有双向实时信息传递工,车载设备不断地把列车位置发送给地面设备,地面设备不断地把移动授权发送给车载设备,从而实现移动闭塞。
5 运行控制系统
5.1 一般要求
5.1.1 中低速磁浮交通属新型轨道交通,能与之配套的固定闭塞的信号系统技术已基本处于停滞阶段,固定闭塞信号系统技术不可作为未来信号技术的发展方向,故本条款未将固定闭塞类型列入。
5.1.2 中低速磁浮交通属新型轨道交通,为了满足中低速磁浮交通行车效率与安全运行的要求,故要求采用不间断地连续信息传递和控制。固定闭塞、准移动和移动闭塞等制式下的运行控制系统,均为连续式制式。目前,国内大量采用的基于CBTC的移动闭塞制式运行控制系统,通常具有多个运营等级,主要包括连续通信级、点式通信级和联锁级。运行控制系统正常运用模式应为系统设计规定的最高配置水平等级,即连续通信级。
连续式列车控制方式,其可达行车间隔通常小于110s,满足中低速磁浮交通的客运量需求。而非连续式系统,如点式系统,其可保证的行车间隔多大于180s。点式信息的获取方式与连续式信息获取方式相比具有很大不同,系统所需原始信息的自修正能力差异性很大。因此,大运量、高密度运行的线路,均选用连续式列车控制系统。
5.1.3 车辆基地出入线、正线车站与区间、停车线和折返线与运行控制系统的通过能力、折返能力密切相关,故要求纳入运行控制系统的监控范围。
5.1.4 考虑到行车安全,执行列车紧急制动停车时,要求停车过程不得中途缓解。在紧急制动列车停车后,司机履行一定的操作手续后,列车方能缓解。
5.1.5 列车自动防护(ATP)系统的超速或故障造成列车停车属安全行为。列车超速、车地连续通信中断、列车完整性电路中断、车载设备的重要故障是涉及行车安全的重要故障,通过紧急制动停车,属列车运行中的安全措施。列车运行中车门误开时,采用切除牵引、紧急制动或者常用制动的停车防护措施。
5.1.6 线路上可能存在未装备列车自动防护(ATP)系统车载设备的列车,要求装备车载设备的列车应能与未装备车载设备的列车在线路上同时运行,即混合运行。
5.1.7 为了更好地分析故障和故障定位,故要求运行控制系统具备运行数据的实时记录功能。记录的运行数据包括:设备运行状态、行车里程、速度、驾驶模式、控制情况、列车日检数据。
5.1.8 为了提高运行控制系统的维护水平,故要求运行控制系统具备自动检测、报警和表示功能。通过车载设备的日检,确保故障列车不上线运营。
5 运行控制系统
5.1 一般要求
5.1.1 中低速磁浮交通属新型轨道交通,能与之配套的固定闭塞的信号系统技术已基本处于停滞阶段,固定闭塞信号系统技术不可作为未来信号技术的发展方向,故本条款未将固定闭塞类型列入。
5.1.2 中低速磁浮交通属新型轨道交通,为了满足中低速磁浮交通行车效率与安全运行的要求,故要求采用不间断地连续信息传递和控制。固定闭塞、准移动和移动闭塞等制式下的运行控制系统,均为连续式制式。目前,国内大量采用的基于CBTC的移动闭塞制式运行控制系统,通常具有多个运营等级,主要包括连续通信级、点式通信级和联锁级。运行控制系统正常运用模式应为系统设计规定的最高配置水平等级,即连续通信级。
连续式列车控制方式,其可达行车间隔通常小于110s,满足中低速磁浮交通的客运量需求。而非连续式系统,如点式系统,其可保证的行车间隔多大于180s。点式信息的获取方式与连续式信息获取方式相比具有很大不同,系统所需原始信息的自修正能力差异性很大。因此,大运量、高密度运行的线路,均选用连续式列车控制系统。
5.1.3 车辆基地出入线、正线车站与区间、停车线和折返线与运行控制系统的通过能力、折返能力密切相关,故要求纳入运行控制系统的监控范围。
5.1.4 考虑到行车安全,执行列车紧急制动停车时,要求停车过程不得中途缓解。在紧急制动列车停车后,司机履行一定的操作手续后,列车方能缓解。
5.1.5 列车自动防护(ATP)系统的超速或故障造成列车停车属安全行为。列车超速、车地连续通信中断、列车完整性电路中断、车载设备的重要故障是涉及行车安全的重要故障,通过紧急制动停车,属列车运行中的安全措施。列车运行中车门误开时,采用切除牵引、紧急制动或者常用制动的停车防护措施。
5.1.6 线路上可能存在未装备列车自动防护(ATP)系统车载设备的列车,要求装备车载设备的列车应能与未装备车载设备的列车在线路上同时运行,即混合运行。
5.1.7 为了更好地分析故障和故障定位,故要求运行控制系统具备运行数据的实时记录功能。记录的运行数据包括:设备运行状态、行车里程、速度、驾驶模式、控制情况、列车日检数据。
5.1.8 为了提高运行控制系统的维护水平,故要求运行控制系统具备自动检测、报警和表示功能。通过车载设备的日检,确保故障列车不上线运营。
5.2 列车驾驶模式
5.2.1 驾驶模式从低到高的排列顺序是根据运行控制系统对列车的控制水平进行排列。非限制人工驾驶模式中,运行控制系统对列车的控制水平最低,驾驶模式最低;无人驾驶模式中,运行控制系统对列车的控制水平最高,驾驶模式最高。ATO驾驶模式和无人驾驶模式可提高行车效率,实现列车运行自动调整,维持列车运行秩序,减少司乘人员劳动强度和人员配备的数量。然而,由于无人驾驶涉及站线配置、车辆、行车组织、车辆段配置等多种因素,我国又缺乏运用经验,故无人驾驶系统宜在探索经验后,根据用户需要逐步采用。
5.2.2 第3款 驾驶模式从低到高的顺序是:非限制人工驾驶、限制人工驾驶、受控人工驾驶、ATO驾驶模式、无人驾驶模式。
5.2.3 在运行控制系统控制范围内,列车的正常运行模式是受控人工驾驶、ATO驾驶模式或者无人驾驶模式。故要求在系统故障状态下,采用限制人工驾驶或者非限制人工驾驶模式需经调度员特殊授权。
5.3 列车自动监控
5.3.2 列车运行调整是列车自动监控(ATS)系统的基本功能,列车运行调整分为列车自动调整和人工调整。列车运行自动调整的手段有:改变列车区间走行时间、控制列车停站时间等。列车运行人工调整的手段有:实施扣车或取消、提前发车或跳停、改变列车在区间的运行时间等。
5.3.5、5.3.6 列车自动监控(ATS)系统控制中心和车站分别具有控制权限时的控制项目有差别,如道岔的操作,需要清楚了解现场情况。车站具有控制权限,控制中心没有控制权限。
5.3.8 随着计算机技术及控制技术的发展,并考虑到不同线路的同时建设或者改、扩建,列车自动监控(ATS)系统可以多运营线路共用,实现相关线路的统一指挥,并且也有利于实现资源共享。
5.3.9 列车进路控制功能是ATS的主要功能之一。联锁表以进路为主体,表中列出与列车运行相关的全部进路及进路与进路、进路与道岔、信号机之间的关系。该表的生成应满足运营要求,也是联锁设备设计的重要依据。而运行时刻表和列车识别号是正确处理列车进路、实现正确列车进路控制的依据。
5.4 列车自动防护
5.4.4 超速防护功能是列车自动防护(ATP)系统的基本功能,为了分析问题,故要求列车自动防护(ATP)系统对司机的操作和运行控制系统设备运行状况进行记录。列车自动防护(ATP)车载设备记录的内容包括:设备运行状况、行车里程、牵引、制动控制情况、驾驶模式、速度、列车日检数据、故障报警数据、车载设备输入或输出信息。
5.4.5 保证列车自动防护(ATP)系统车载设备列车位置测量误差不大于±2%。
5.4.6 参照《城市轨道交通基于通信的列车自动控制系统技术要求》CJ/T 407-2012附录B:列车位置最大测量误差≤2%。
5.4.7 区域控制器负责对控制区域内的列车进行管理。当新列车驶入控制区域内时,区域控制器对新列车进行注册管理;注册成功后,区域控制器将新列车编号纳入注册表,并对该列车在控制区域内的移动进行管理,对该列车发送移动授权;当该列车驶出控制区域范围,区域控制器将该列车从注册表中注销,不再对该列车进行管理。
5.4.11 装备列车自动防护(ATP)系统的列车其实际车速的表示应由列车自动防护(ATP)系统驱动,但车载列车自动防护(ATP)系统的测速设备在保证安全性和可靠性的前提下可与列车共用。中低速磁浮列车的最高运行速度为120km/h,列车自动防护(ATP)系统预留了10%的余量,故要求列车自动防护(ATP)系统测速范围最大到132km/h。
5.5 列车自动运行
5.5.5 在车站发车时,由于涉及关闭车门及站台屏蔽门,为了确保人员安全,要求列车的启动由司机控制。在区间停车后,由于不涉及关闭车门及站台屏蔽门,在允许信号的条件下,列车可以自动启动。
5.5.6 列车自动监控(ATS)系统是列车运行调整的命令下达方,列车自动运行(ATO)系统是列车运行调整的执行方,二者相互结合才能完成列车的运行调整。
5.5.7 车门防护是列车自动防护(ATP)的基本功能,涉及行车及人员安全,故要求在车载设备给出门允许,列车自动运行(ATO)系统判断停准后才能自动打开相应侧车门。
5.5.8 为了满足列车自动运行(ATO)控制过程中的舒适度,要求列车自动运行(ATO)系统控制列车减速度的变化率不宜大于0.75m/s3。
5.5.9 参照《城市轨道交通基于通信的列车自动控制系统技术要求》CJ/T 407-2012附录B。
5.5.11 列车自动运行(ATO)车载设备记录的内容包括:报警类别、制动状态、制动指令、车载设备的计算速度曲线及实际运行速度曲线、车站通过、定位停车超精度范围显示及报警记录、运行时分。
5.6 列车无人驾驶
5.6.1 第2款参照2015年2月中国城市轨道交通协会技术装备专业委员会发布的《城市轨道交通信号系统用户需求书(范本)(试行版)》。
车载设备应具备根据列车自动监控(ATS)系统休眠指令和司机本地控制列车在预定义的休眠窗口进行休眠的功能,并将休眠状态反馈给列车自动监控(ATS)系统。车载设备应具备根据唤醒指令和司机本地控制列车在预定义的唤醒窗口进行唤醒的功能,并将唤醒状态反馈给列车自动监控(ATS)系统。
系统应具备蠕动驾驶模式。蠕动驾驶模式:为车辆网络出现故障,或车辆与信号车载设备通信故障时的应急模式。需由中心人工确认后,信号系统启动蠕动模式。列车以蠕动模式运行时,列车自动防护(ATP)系统监控列车以不超过25km/h的速度全自动运行,当列车以蠕动模式进站自动停车后,应施加紧急制动以防止列车移动,等待人工处理。
5.7 计算机联锁
5.7.3 计算机联锁系统涉及行车安全为了减少误操作,故要求一次单一操作不应形成有效操作命令。
5.7.7 为依据联锁表办理进路的基本原则,也是保证进路安全的基本原则。
5.7.8 站内轨道及其上方出现影响行车安全或危及人员安全状况时,需要操作站台紧急关闭按钮,以尽可能地阻止列车进站,防止危险事件发生。
5.7.9 自动站间闭塞是通过计算机联锁自动检查站间空闲,人工办理站间闭塞手续。在规定的人工驾驶模式下列车根据信号指示离站后,若站间闭塞手续不取消,即可自动构成站间闭塞的行车方式为自动站间闭塞,其闭塞范围为相邻两座车站的出站信号机之间。进路闭塞方式是列车运行间隔为进路始端信号机至相邻下一架顺向信号机之间的闭塞方法。和自动站间闭塞方式相比,通过增加信号机,进路闭塞方式可以压缩列车运行间隔。
5.8 维护监测系统
5.8.2 维护监测系统监测的运行控制系统运行的工作状态包括:联锁系统的工作状态、ATS系统的工作状态、ATP系统的工作状态、ATO系统的工作状态、电源屏的工作状态以及维护监测系统设备的自身工作状态。
5.8.3 ATS系统、计算机联锁系统、ATP系统、ATO系统、电源屏具有自身监测报警功能,这些监测报警信息通过监测网络传送到维修中心的维护监测设备。
6 车辆基地
6.1 车辆段
6.1.1 车辆段一般配置试车线、培训中心和维修中心,故要求车辆段应配置试车线设备、培训设备,宜配置维护监测设备。
6.1.2 试车线主要功能是完成车载设备的静态调试、动态调试。为了满足上述功能,故作此条规定。
6.1.3 如果正线采用无人驾驶,那么车辆基地也需要采用无人驾驶,故要求车辆基地宜设与正线系统功能相适应的运行控制系统。车辆段可部分或全部纳入运行控制系统的监控范围,应根据车辆段的规模和作业性质而定。车辆段部分或全部纳入运行控制系统控制范围,可以提高列车在正线的运行能力。
6.1.4 为了保证培训的效果,故要求用于培训的运行控制主要设备功能应与实际运用的运行控制设备功能一致。
6 车辆基地
6.1 车辆段
6.1.1 车辆段一般配置试车线、培训中心和维修中心,故要求车辆段应配置试车线设备、培训设备,宜配置维护监测设备。
6.1.2 试车线主要功能是完成车载设备的静态调试、动态调试。为了满足上述功能,故作此条规定。
6.1.3 如果正线采用无人驾驶,那么车辆基地也需要采用无人驾驶,故要求车辆基地宜设与正线系统功能相适应的运行控制系统。车辆段可部分或全部纳入运行控制系统的监控范围,应根据车辆段的规模和作业性质而定。车辆段部分或全部纳入运行控制系统控制范围,可以提高列车在正线的运行能力。
6.1.4 为了保证培训的效果,故要求用于培训的运行控制主要设备功能应与实际运用的运行控制设备功能一致。
6.2 停车场
6.2.1 停车场一般作为列车停车使用,不设置试车线和培训中心,故要求停车场运行控制系统配置应设ATS设备、计算机联锁设备和列车占用/空闲检测设备,宜设维护监测设备。
6.2.2 停车场可部分或全部纳入运行控制系统的监控范围,应根据停车场的规模和作业性质而定。停车场部分或全部纳入运行控制系统控制范围,可以提高列车在正线的运行能力。
7 列车检测与信息传递
7.1 一般要求
7.1.1 列车占用检测设备是检测列车在线路区段位置的重要基础设备,涉及行车安全,故要求能安全、准确地实现列车的占用或空闲检测。
7.1.2 运行控制系统的车地双向通信技术是列车定位和间隔控制的重要技术手段,要求车地通信设备必须适应列车的工作环境,并具有较强的差错控制能力,保证车地双向信息传递安全、确保信息准确。
7.1.3 列车定位设备包括列车相对位置的测量以及列车位置的校正。通过线路上校正点对列车位置的校正,可以获得列车在线路上的绝对位置,通过连续的列车测速测距可以获得列车相对绝对位置的偏移量,从而获得列车的准确位置。
7 列车检测与信息传递
7.1 一般要求
7.1.1 列车占用检测设备是检测列车在线路区段位置的重要基础设备,涉及行车安全,故要求能安全、准确地实现列车的占用或空闲检测。
7.1.2 运行控制系统的车地双向通信技术是列车定位和间隔控制的重要技术手段,要求车地通信设备必须适应列车的工作环境,并具有较强的差错控制能力,保证车地双向信息传递安全、确保信息准确。
7.1.3 列车定位设备包括列车相对位置的测量以及列车位置的校正。通过线路上校正点对列车位置的校正,可以获得列车在线路上的绝对位置,通过连续的列车测速测距可以获得列车相对绝对位置的偏移量,从而获得列车的准确位置。
7.2 基本功能
7.2.1 在列车追踪运行的情况下,准移动闭塞的列车安全距离,应以前方列车所在闭塞区段入口端为目标地点(危险点),由后续列车以当前速度制动停车所需走行距离加安全保护距离确定。准移动闭塞后方列车的目标点是前行列车所在闭塞区段的入口端,闭塞分区的列车占用或空闲是准移动闭塞的基础,故作此条规定。
7.2.2 在列车追踪运行的情况下,移动闭塞的列车安全距离,可按前方列车骤然停车,后续列车按当前速度制动停车所需走行距离加安全保护距离确定。移动闭塞系统是基于车地双向通信和列车定位,故要求车载设备不断地将列车的位置传送至区域控制器,区域控制器根据线路上列车位置及线路的状态信息生成列车控制信息,并传送至车载设备。
7.3 技术要求
7.3.1 根据中低速磁浮列车和轨道无接触的特点,列车占用检测有连续检测和非连续检测方式,根据系统构成和功能实施的需要,可以选择连续检测或非连续检测方式。
7.3.2 中低速磁浮列车的占用检测、列车定位技术均只能基于无接触方式实现,而列车的占用检测、列车定位技术是ATP系统的重要组成部分,为满足ATP系统的技术要求,故要求列车的占用检测、列车定位技术和设备必须符合故障一安全的原则。
7.3.4 车地信息传递有轨道电路、感应环线、无线通信等方式。由于中低速磁浮交通列车和轨道没有接触,无法使用轨道电路进行列车位置检测和车地通信。交叉感应环线方式已经经过试验线检验,满足中低速磁浮环境通信要求,故推荐采用。
7.3.5 第2款 感应环线是车地通信的通道,当环线断线或完整性故障时,会造成车地通信中断,故要求TWC地面设备应对感应环线通道的完整性检测和故障报警。
7.3.6 第1款 当车地通信设备的场强覆盖采用无线时,基于无线通信的场强覆盖宜采用天线、漏缆和裂缝波导管方式,也可根据现场条件混合使用。
7.3.6 第2款 为了保证车地信息传输的连续性,要求无线通信系统保证列车高速移动时漫游切换。
7.3.6 第4款 车地无线通信设备所处的外界环境较为复杂、恶劣,包括各种干扰源,甚至恶意入侵、攻击。本条文规定了确保车地传输信息安全的基本要求。
7.3.6 第5款 目前,车地无线通信采用公用的频段,容易受到其他通信系统同频段信号的干扰,当不同运营线路同站台换乘时也容易受到相邻线路同频段信号的干扰。为了避免无线通信的相互干扰,故要求车地无线通信设备应与其他系统、其他运营线路统一规划通信的频点。
8 信号显示
8.1 地面信号机显示
8.1.1 LED信号机相对于传统灯丝信号机具有节能、可视性好、寿命长等优点,国内已形成标准《LED铁路信号机构通用技术条件》TB 3242,在国内城市轨道交通已经大量应用,故本条要求地面信号机宜采用LED信号机。
8.1.2 中低速磁浮交通属城市交通客运系统,采用右侧行车制,按传统需求信号机也设于行车方向的右侧。
8.1.3 第1款 中低速磁浮交通设置ATP系统,自动闭塞通过信号机已经失去主体信号的作用,所以一般可不设通过信号机。当ATP车载设备故障时,为便于司机掌握列车运行位置,可结合系统特点设置必要的位置标志,根据需要也可设置通过信号机。
8 信号显示
8.1 地面信号机显示
8.1.1 LED信号机相对于传统灯丝信号机具有节能、可视性好、寿命长等优点,国内已形成标准《LED铁路信号机构通用技术条件》TB 3242,在国内城市轨道交通已经大量应用,故本条要求地面信号机宜采用LED信号机。
8.1.2 中低速磁浮交通属城市交通客运系统,采用右侧行车制,按传统需求信号机也设于行车方向的右侧。
8.1.3 第1款 中低速磁浮交通设置ATP系统,自动闭塞通过信号机已经失去主体信号的作用,所以一般可不设通过信号机。当ATP车载设备故障时,为便于司机掌握列车运行位置,可结合系统特点设置必要的位置标志,根据需要也可设置通过信号机。
8.2 车载信号显示
8.2.1 ATP是确保行车安全的设备,故要求以ATP车载设备的人机界面作为列车行车的凭证。ATP车载设备故障的列车、未装备ATP车载设备的列车或者ATP地面设备故障情况下降级运行的列车,应按照地面信号机的指示行车。
8.2.2 车载人机是ATP车载设备的重要组成部分,是司机根据ATP行车的凭证,故要求车载人机界面提供条文中信息显示。
9 系统供电
9.1 地面设备供电
9.1.1 运行控制系统是保证行车安全,提升运行效率,与行车指挥关系密切的系统,故要求运行控制系统的供电应为一级负荷,应设两路独立电源供电。
9.1.4 本条参照《铁路信号智能电源屏技术条件》铁道部运基信号[2005]458号文。
9.1.5 本条参照《铁路信号智能电源屏技术条件》铁道部运基信号[2005]458号文。
9.1.7 本条参照《地铁设计规范》GB 50157-2013中17.2.8。
9 系统供电
9.1 地面设备供电
9.1.1 运行控制系统是保证行车安全,提升运行效率,与行车指挥关系密切的系统,故要求运行控制系统的供电应为一级负荷,应设两路独立电源供电。
9.1.4 本条参照《铁路信号智能电源屏技术条件》铁道部运基信号[2005]458号文。
9.1.5 本条参照《铁路信号智能电源屏技术条件》铁道部运基信号[2005]458号文。
9.1.7 本条参照《地铁设计规范》GB 50157-2013中17.2.8。
9.2 车载设备供电
9.2.1 由于车载运行控制设备的车上供电电源电压存在波动范围,为避免车载运行控制系统设备过流时对车上供电电源造成影响,故要求车载运行控制设备应设过压和过流保护。
9.2.2 本条参照《地铁设计规范》GB 50157-2013中17.2.8。
9.2.3 车载人机设备属于非安全设备,为了避免车载人机设备故障时对车载运行控制主机设备的供电造成影响,故要求车载主机设备的电源和人机设备的电源应分别设置断路器。
10 系统的电磁兼容与防护
10.1 电磁兼容
10.1.1 本条引用《轨道交通 电磁兼容 第4部分:信号和通信设备的发射与抗扰度》GB/T 24338.5的规定。
10.1.2 本条引用《轨道交通 电磁兼容 第3-2部分:机车车辆设备》GB/T 24338.4的规定。
10.1.3 本条引用《轨道交通 电磁兼容 第5部分:地面供电装置和设备的发射与抗扰度》GB/T 24338.6的规定。
10 系统的电磁兼容与防护
10.1 电磁兼容
10.1.1 本条引用《轨道交通 电磁兼容 第4部分:信号和通信设备的发射与抗扰度》GB/T 24338.5的规定。
10.1.2 本条引用《轨道交通 电磁兼容 第3-2部分:机车车辆设备》GB/T 24338.4的规定。
10.1.3 本条引用《轨道交通 电磁兼容 第5部分:地面供电装置和设备的发射与抗扰度》GB/T 24338.6的规定。
10.2 防雷与接地
10.2.2 第5款参照《地铁设计规范》GB 50157-2013中17.7.6,列车运行控制系统设备必须具有良好的电磁兼容性能,良好的接地技术和接地标准是提高运行控制系统设备电磁兼容性能的重要手段,故要求综合接地系统的接地电阻不应大于1.0Ω。
10.2.3 由于运行控制系统技术水平、安全防护水平技术的不断提高和强化,抗干扰能力也有大幅提升,敷设间距应符合《地铁设计规范》GB 50157-2013中17.7.4的规定。
10.2.4 本条引用《建筑物电子信息系统防雷技术规范》GB 50343的规定。
10.2.5 本条引用《铁道信号设备雷电电磁脉冲防护技术条件》TB/T 3074的规定。
11 检测和验收
11.1 检 测
11.1.1、11.1.3 中低速磁浮交通运行控制系统采用的信号机和电源(含UPS)设备与国内城市轨道交通信号系统采用的设备基本相同,无特需技术要求。信号机和电源(含UPS)设备的检测应符合现行国家标准《城市轨道交通信号工程施工质量验收规范》GB 50578的规定。
11.1.2、11.1.4~11.1.9 中低速磁浮列车运行控制系统采用交叉感应环线实现移动闭塞,是列车之间的最小安全追踪间隔不预先设定,并随列车的移动、速度的变化而变化的闭塞方式,其交叉感应环线设备、计算机联锁(CI)系统、列车自动防护(ATP)系统、列车自动运行(ATO)系统、列车自动监控(ATS)系统、列车无人驾驶系统的各项功能检测尚无现行国家标准可执行。由于中低速磁浮交通运行控制系统检测还没有应用经验,本章主要内容参照《城市轨道交通信号工程施工质量验收规范》GB 50578-2010编写。本规范规定运行控制系统的项目检测应符合设计要求。
11.1.7 无人驾驶系统的检测根据本标准7.6无人驾驶系统的功能编写,该内容尚需在探索经验后,再逐渐完善。
11.1.10
1 引用国家标准《城市轨道交通试运营基本条件》GB/T 30013的4.5.2。
2 国家标准《城市轨道交通试运营基本条件》GB/T 30013对运营指标作出规定:信号系统故障率不应高于1次/万列公里。
11 检测和验收
11.1 检 测
11.1.1、11.1.3 中低速磁浮交通运行控制系统采用的信号机和电源(含UPS)设备与国内城市轨道交通信号系统采用的设备基本相同,无特需技术要求。信号机和电源(含UPS)设备的检测应符合现行国家标准《城市轨道交通信号工程施工质量验收规范》GB 50578的规定。
11.1.2、11.1.4~11.1.9 中低速磁浮列车运行控制系统采用交叉感应环线实现移动闭塞,是列车之间的最小安全追踪间隔不预先设定,并随列车的移动、速度的变化而变化的闭塞方式,其交叉感应环线设备、计算机联锁(CI)系统、列车自动防护(ATP)系统、列车自动运行(ATO)系统、列车自动监控(ATS)系统、列车无人驾驶系统的各项功能检测尚无现行国家标准可执行。由于中低速磁浮交通运行控制系统检测还没有应用经验,本章主要内容参照《城市轨道交通信号工程施工质量验收规范》GB 50578-2010编写。本规范规定运行控制系统的项目检测应符合设计要求。
11.1.7 无人驾驶系统的检测根据本标准7.6无人驾驶系统的功能编写,该内容尚需在探索经验后,再逐渐完善。
11.1.10
1 引用国家标准《城市轨道交通试运营基本条件》GB/T 30013的4.5.2。
2 国家标准《城市轨道交通试运营基本条件》GB/T 30013对运营指标作出规定:信号系统故障率不应高于1次/万列公里。
11.2 验 收
11.2.1 本条对运行控制系统工程施工质量验收项目作了规定。
11.2.2 国内城市轨道交通信号系统工程施工质量验收按照现行国家标准《城市轨道交通信号工程施工质量验收规范》GB 50578执行,该国家标准也适用于中低速磁浮交通运行控制系统工程施工质量验收。
免责申明:本站所有资源均通过网络等公开合法渠道获取,该资料仅作为阅读交流使用,并无任何商业目的,其版权归作者或出版方所有,本站不对所涉及的版权问题负任何法律责任和任何赔偿,在本站咨询或购买后默认同意此免责申明;
法律责任:如版权方、出版方认为本站侵权,请立即通知本站删除,物品所标示的价格,是对本站搜集、整理、加工该资料以及本站所运营的费用支付的适当补偿,资料索取者(顾客)需尊重版权方的知识产权,切勿用于商业用途,信息;

『JGJ T351-2015』建筑玻璃膜应用技术规程
中华人民共和国行业标准建筑玻璃膜应用技术规程TechnicalspecificationforapplicationofbuildingglassfilmandcoatingJGJ/T351-2015批准部门:中华人民共和国住房和...
2025-05-19
『GB T51190-2016』海底电力电缆输电工程设计规范
中华人民共和国国家标准海底电力电缆输电工程设计规范CodefordesignofsubmarinepowercableprojectGB/T51190-2016主编部门:中国电力企业联合会批准部门:中华人民共和...
2025-05-19
『JGJ T399-2016』城市雕塑工程技术规程
中华人民共和国行业标准城市雕塑工程技术规程TechnicalspecificationforpublicsculptureprojectconstructionJGJ/T399-2016批准部门:中华人民共和国住房和城乡建设...
2025-05-19
『CECS334:2013』集装箱模块化组合房屋技术规程
中国工程建设协会标准集装箱模块化组合房屋技术规程TechnicalspecificationformodularfreightcontainerbuildingCECS334:2013主编单位:中国钢结构协会中国国际海运...
2025-05-19
『GB50038-2005』人民防空地下室设计规范
中华人民共和国国家标准人民防空地下室设计规范CodefordesignofcivilairdefencebasementGB50038-2005主编部门:国家人民防空办公室批准部门:中华人民共和国建设部施...
2025-05-19
『CJJ32-2011』含藻水给水处理设计规范
...
2025-05-19